scala
spark-ml
gee
数维杯
DASCTF2022十月挑战赛
Lock
keras
es6
pytorch配置GPU版本
语音信号处理
ZigBee
证件照
AIR32
解释器模式
windterm
智慧城市
CSDN勤学
数据增强
hello world
SI522
学习笔记
2024/5/7 4:59:39【CS学习笔记】12、特权提升
0x00 用户账户控制
自 Windows vista 开始,Windows 系统引进了用户账户控制机制,即 UACUser Account Control机制,UAC 机制在 Win 7中得到了完善。UAC 与 UNIX 中的 sudo 工作机制十分相似,平时用户以普通权限工作,当…

极客时间 MySQL实战学习笔记 9-15讲
No.9 普通索引和唯一索引,应该怎么选择?
查询过程 其实查询过程两者的时间差距是微乎其微的,普通索引要比唯一索引多一次判断下一条记录是否符合,但InnoDB 的数据是按数据页为单位来读写的,所以就算多读一次也占用不了…
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming](https://img-blog.csdnimg.cn/direct/718639af45714c9496ccc3df795adbff.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-2 动态规划 Dynamic Programming 1. 基本概念2. 代码详解3. 简单一维案例 1. 基本概念
Richoard Bell man 最优化理论: An optimal policy has the …
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-6根轨迹Root locus](https://img-blog.csdnimg.cn/direct/c38caad53dc0487db94ee3507867adb0.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-6根轨迹Root locus
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-6根轨迹Root locus 1. 根的作用2. 手绘技巧3. 分离点/汇合点&根轨迹的几何性质 1. 根的作用 G ( s ) s 3 s 2 2 s 4 G\left( s \right) \frac{s3}{s^22s4} G(s)s22s4s3…

2022全国职业技能大赛-网络安全赛题解析总结⑨(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全 (40分)模块C CTF夺旗-攻击(20分)模块D CTF夺旗-防御(20分)有什么不懂得可以联系博主!交流群:603813289模块A 基础设施…
2022全国职业技能大赛-网络安全赛题解析总结⑦(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全(40分)模块C CTF夺旗-攻击(本模块20分)模块D CTF夺旗-防御(本模块20分)有什么不懂得可以联系博主!交流群:603813289模块…
Java入门高频考查基础知识4(字节跳动面试题18题2.5万字参考答案)
Java 是一种广泛使用的面向对象编程语言,在软件开发领域有着重要的地位。Java 提供了丰富的库和强大的特性,适用于多种应用场景,包括企业应用、移动应用、嵌入式系统等。 以下是几个面试技巧: 1. 复习核心概念:回顾 Ja…
![[足式机器人]Part2 Dr. CAN学习笔记-Ch04 Advanced控制理论](https://img-blog.csdnimg.cn/direct/d133933db11248f5a59dae0d309219fa.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Ch04 Advanced控制理论
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Ch04 Advanced控制理论 1. 绪论2. 状态空间表达State-Space Representation3. Phase Portrait相图,相轨迹3 1. 1-D3 2. 2-D3 3. General Form3 4. Summary3.5. 爱情中的数学-Phase …
探索设计模式的魅力:工厂方法模式
工厂方法模式是一种创建型设计模式,它提供了一种创建对象的接口,但将具体实例化对象的工作推迟到子类中完成。这样做的目的是创建对象时不用依赖于具体的类,而是依赖于抽象,这提高了系统的灵活性和可扩展性。 以下是工厂方法模式的…

【内网学习笔记】5、BloodHound 的使用
1、介绍
BloodHound 使用可视化图形显示域环境中的关系,攻击者可以使用 BloodHound 识别高度复杂的攻击路径,防御者可以使用 BloodHound 来识别和防御那些相同的攻击路径。蓝队和红队都可以使用 BloodHound 轻松深入域环境中的权限关系。
BloodHound 通…
【CS学习笔记】23、malleable命令
0x00 前言
这节课将来看看如何优化 CS 的攻击载荷,从而使它更方便、隐蔽些。
0x01 malleable 命令和控制
malleable 是一种针对特定领域的语言,主要用来控制 Cobalt Strike Beacon
在开启 teamserver 时,在其命令后指定配置文件即可调用&…
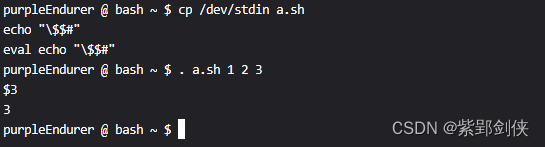
Linux shell编程学习笔记34:eval 命令
0 前言
在JavaScript语言中,有一个很特别的函数eval,eval函数可以将字符串当做 JavaScript 代码执行,返回表达式或值。
在Linux Shell 中也提供了内建命令eval,它是否具有JavaScript语言中eval函数的功能呢? 1 eval命…
MYSQL窗口函数详解和实战(内含示例)
MySQL 窗口函数提供了跨与当前行关联的分组的计算能力。 窗口函数与聚合函数不同,聚合函数对每个分组进行计算并为每个分组返回一行,而窗口函数不会将每个分组输出到一行,而是将每个分组的计算结果合并到与之关联的行中。 目录
一、CUME_DIS…
【CS学习笔记】11、用户驱动溢出攻击
0x00 前言
Beacon 运行任务的方式是以jobs去运行的,比如键盘记录、PowerShell 脚本、端口扫描等,这些任务都是在 beacon check in 之间于后台运行的。
jobs:查看当前 Beacon 中的任务
jobkill:加上任务 ID,对指定任…

图解HTTP 学习笔记
个人学习 图解HTTP篇 U1 网络基础
使用HTTP协议访问Web,当在网页浏览器地址栏中输入URL时Web页面呈现的过程 TCP/IP 协议族架构 TCP/IP 通信传输流 DNS域名解析服务 各种协议与HTTP协议的关系 URL与URI U2 简单的HTTP协议
HTTP通过请求和响应的交换达成通信 请求报…

极客时间 MySQL实战学习笔记 1-8讲
No.1 MySQL的基本架构 连接器:负责跟客户端建立连接、获取权限、维持和管理连接。查询缓存:查询请求先访问缓存(key 是查询的语句,value 是查询的结果)。命中直接返回。不推荐使用缓存,更新会把缓存清除(关闭缓存:参数…
【CS学习笔记】14、powerup提权的方法
0x00 介绍
PowerUp 所做的事是寻找可能存在弱点的地方,从而帮助提权。
利用 PowerUp 进行提权需要首先导入 ps1 文件powershell-import PowerUp.ps1,再执行powershell Invoke-AllChecks命令,使用 PowerUp 脚本可以快速的帮助我们发现系统弱…
【CS学习笔记】5、如何建立Payload处理器
这一小节学起来感觉有些吃力,里面很多概念理解的不是很清楚,如果有大佬看到描述错误的地方欢迎留言指正,避免误导他人。
再次声明,这只是我的个人学习笔记,不要当成教程去看,建议想学习CS的小伙伴可以看看…

Spring 源码学习笔记(二) Java Bean容器
个人学习Spring源码系列 Java Bean容器
源码地址 https://github.com/spring-projects/spring-framework
目录
个人学习Spring源码系列 整体架构篇
什么是Spring Bean?
Spring Bean的作用域
Spring Bean自动装配方式
容器的基本用法
功能分析
JavaBean 核心类
容器基…
2022全国职业技能大赛-网络安全赛题解析总结④(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全(40分)模块C CTF夺旗-攻击(20分)模块D CTF夺旗-防御(20分)有什么不懂得可以联系博主!交流群:603813289模块A 基础设施设…
2022全国职业技能大赛-网络安全赛题解析总结⑩(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全 (40分)模块C CTF夺旗-攻击(20分)模块D CTF夺旗-防御(20分)有什么不懂得可以联系博主!交流群:603813289模块A 基础设施…
【内网学习笔记】15、系统服务权限配置不当利用
PowerUp
PowerUp 可以用来寻找目标中权限配置不当的服务,下载地址:https://github.com/PowerShellEmpire/PowerTools/blob/master/PowerUp/PowerUp.ps1
在 PowerShell 中导入并执行脚本
Import-Module .\PowerUp.ps1
Invoke-AllChecks如果 PowerShell…
【内网学习笔记】21、哈希传递与票据传递
1、哈希传递
哈希传递(Pass The Hash, PTH)顾名思义,就是利用哈希去登录内网中的其他机器,而不是通过明文密码登录的方式。
通过哈希传递,攻击者不需要花时间破解哈希值得到明文,在Windows Server 2012 R…
【内网学习笔记】16、组策略凭据获取
0、前言
SYSVOL 是活动目录里的一个用于存储域公共文件服务器副本的共享文件夹,在域中的所有域控之间进行复制,SYSVOL 在所有经过身份验证的域用户或者域信任用户具有读权限的活动目录域范围内共享,所有的域策略均存放在 C:\Windows\SYSVOL\…
【内网学习笔记】17、令牌窃取
0、前言
令牌(Token)是指系统中的临时秘钥,相当于账户和密码,有了令牌就可以在不知道密码的情况下访问目标相关资源了,这些令牌将持续存在于系统中,除非系统重新启动。
1、MSF
在获取到 Meterpreter She…
【内网学习笔记】26、ntds.dit 的提取与散列值导出
0、前言
在活动目录中,所有数据都保存在 ntds.dit 文件中,ntds.dit 是一个二进制文件,存储位置为域控的 %SystemRoot%\ntds.dit
ntds.dit 中包含(但不限于)用户名、散列值、组、GPP、OU 等与活动目录相关的信息&…
【内网学习笔记】24、SPN 的应用
0、前言
SPN
Windows 域环境是基于微软的活动目录服务工作的,它在网络系统环境中将物理位置分散、所属部门不同的用户进行分组和集中资源,有效地对资源访问控制权限进行细粒度的分配,提高了网络环境的安全性及网络资源统一分配管理的便利性…
【CS学习笔记】13、bypassuac
Bypass UAC 有两个步骤,分别是:
1、利用 UAC 漏洞来获取一个特权文件副本
2、使用 DLL 劫持进行代码执行
首先使用shell whoami /groups查看当前上线主机用户的所属组及 UAC 等级 通过返回信息可以看出,当前用户为管理员权限,U…
【内网学习笔记】3、本地工作组信息收集
1、手动收集本地工作组信息
查看当前权限
whoami 本机网络配置信息
ipconfig /all操作系统和版本信息(英文版)
systeminfo | findstr /B /C:"OS Name" /C:"OS Version" 操作系统和版本信息(中文版)
syst…
【内网学习笔记】4、域内信息收集
1、判断是否存在域
ipconfig
查看网关 IP 地址、DNS 的 IP 地址、域名、本机是否和 DNS 服务器处于同一网段。
ipconfig /allC:\Users\daniel10> ipconfig /allWindows IP 配置主 DNS 后缀 . . . . . . . . . . : teamssix.comDNS 后缀搜索列表 . . . . . . . . : team…
【内网学习笔记】13、内网中绕过无法上传文件限制
1、前言
有次发现这样的一个情况,目标云桌面不出网且不允许上传文件但是可以复制文本,于是便想着通过 PowerShell 将 exe 程序编码成 base64 文本,将编码后的内容复制到目标主机后,再进行解码,这里记录下方法。
2、P…

Linux shell编程学习笔记42:hdparm命令
ChatGPT 和文心一言哪个更好用?
从智能回复、语言准确性、知识库丰富度等方面比较,两大AI助手哪个更胜一筹?快来和我们分享一下你的看法吧~ 0 前言
获取硬盘序列号是信息资产管理和信息安全检测中经常要收集的信息,对于Linux来说…
【Python Threading 学习笔记】6、锁lock
往期内容:
1、什么是多线程?
2、添加线程
3、join功能
4、Queue功能
5、不一定有效率GIL
0x00 关于线程锁lock
多线程和多进程最大的不同在于,多进程中,同一个变量,各自有一份拷贝存在于每个进程中,…

Istio服务网格实践指南 学习笔记(一) 服务网格介绍
个人学习Istio系列 学习笔记 服务网格介绍篇
原书网址 https://jimmysong.io/istio-handbook/ 本篇仅为个人学习笔记 Istio是由 Google、IBM、Lyft 等共同开源的 Service Mesh(服务网格)框架,Kubernetes 解决了云原生应用的部署问题&#x…

Spring In Action 学习笔记(一)
个人学习Spring In Action学习笔记系列 (一)
源码地址 https://github.com/spring-projects/spring-framework U1 开始Spring之旅
1.1什么是Spring
Spring是一个开源框架,为简化企业级应用开发应运而生。Spring是一个轻量级的DI和AOP容器框架
轻量级 基于POJO可…
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-7欧拉公式的证明
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-7欧拉公式的证明 e i θ cos θ sin θ i , i − 1 e^{i\theta}\cos \theta \sin \theta i,i\sqrt{-1} eiθcosθsinθi,i−1 证明: f ( θ ) e i θ cos …
《Python编程从入门到实践》学习笔记详解(含详细注释代码)-语法篇
在这篇文章中,将《Python编程从入门到实践》中介绍的重要代码整理总结,并配有书中相关语法的注释,收录了从第1章到第11章的全部重要语法知识点。想要原书pdf版的也可以在留言区留言求分享哦(^_^)
#在这里大量使用prin…

Istio服务网格实践指南 学习笔记(三) 流量管理
个人学习Istio系列 学习笔记 服务网格介绍篇
参考网址 https://istio.io/zh/docs/concepts/traffic-management/ , https://jimmysong.io/istio-handbook/ 本篇仅为个人学习笔记 流量管理是 Isito 中的最基础功能,使用 Istio 的流量管理模型,本质上是…
《Python编程从入门到实践》学习笔记详解-项目篇(数据可视化)
上一篇总结了《Python从入门到实践》的第1章至第11章即基础语法篇,这篇文章将介绍本书的项目篇之数据可视化。
#项目一 数据可视化#绘制简单的折线图
import matplotlib.pyplot as plt
squares[1,4,9,16,25]
plt.plot(squares)
plt.show()#修改标签文字和线条粗细
…
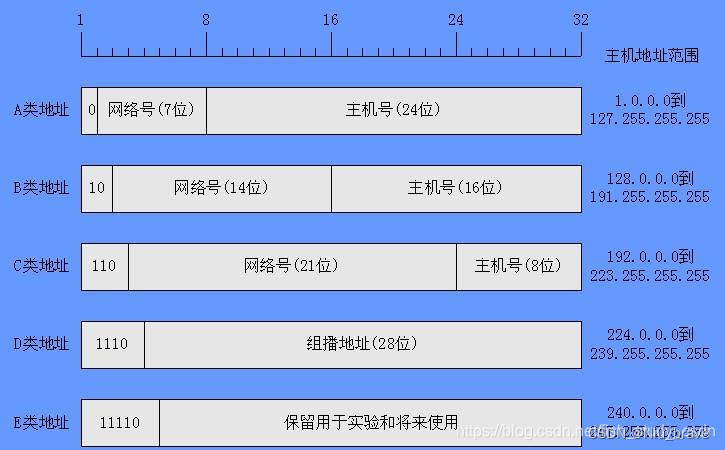
![[计算机网络]计算机网络体系结构](https://img-blog.csdnimg.cn/20210406091722343.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80NDk3Mjk5Nw==,size_16,color_FFFFFF,t_70)
[计算机网络]计算机网络体系结构
参考视频:王道考研 计算机网络 参考博客:答案目录 记录了一些需要掌握了解的知识点,没有具体的回答,用于个人复习。 Time:2021/04-19-21:47 1.1.1 计算机网络的概念、组成、功能和分类
计算机网络的概念计算机网络的组…
《Python编程从入门到实践》学习笔记详解-项目篇(下载数据)
上两篇文章分别介绍了《Python编程从入门到实践》的语法篇和项目篇(数据可视化),这篇文
#项目二 下载数据
#访问并可视化csv和json这两种常见格式存储的数据#csv#提取并读取数据
import csv
filenamefilename.csv
with open(filename) as f:…
Linux工具——vim
目录
编辑
一,vim介绍
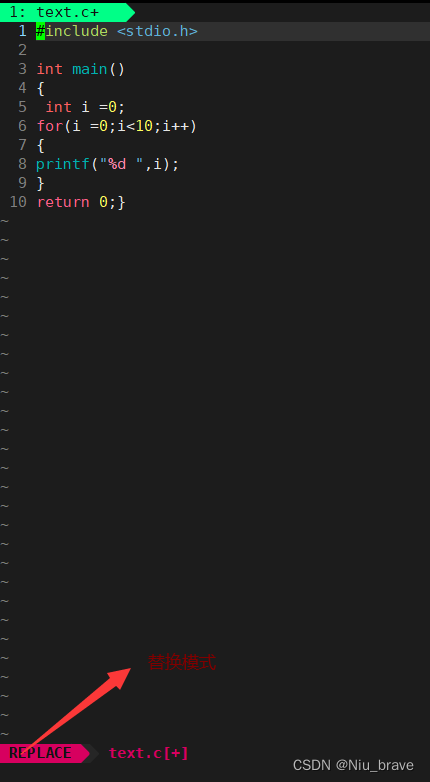
二,vim的五种模式
1.插入模式
2.底行模式
3.视图模式
4.替换模式
5.命令行模式 一,vim介绍 vim是啥呢?相信刚开始接触Linux的小伙伴们都会对这个问题有些许疑惑,今天我们就来介绍一下这…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-16 Robust Controller非线性鲁棒控制器](https://img-blog.csdnimg.cn/direct/9026a8987f9b414d9772e76295c168bc.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-16 Robust Controller非线性鲁棒控制器
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-16 Robust Controller非线性鲁棒控制器 1. Slide Control 滑膜控制2 High Gain High Frequency3. 三种鲁棒控制器的比较如何分析控制器 Robust Control : tp achieve rob…
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-3(3) 刚体的位形 Configuration of Rigid Body
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有帮助请引用 本文参考: . 食用方法 如何表达刚体在空间中的位置与…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-3燃烧卡路里-系统分析实例](https://img-blog.csdnimg.cn/direct/feb729847fcf47658cdec044fbb98b8b.png)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-3燃烧卡路里-系统分析实例
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-3燃烧卡路里-系统分析实例 1. 数学模型2. 比例控制 Proprotional Control 1. 数学模型 2. 比例控制 Proprotional Control

Linux学习——模拟实现mybash小程序
目录
一,跟正宗的bash见个面
二,实现一个山寨的bash
1.提示符
2.输入命令与回显命令 3.解析命令
4.执行命令
5.执行逻辑
三,全部代码 一,跟正宗的bash见个面 在这篇文章中,我会写一个myshell小程序。这个小程序…
2022全国职业技能大赛-网络安全赛题解析总结⑧(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全(40分)模块C CTF夺旗-攻击(20分)模块D CTF夺旗-防御(20分)有什么不懂得可以联系博主!交流群:603813289模块A 基础设施设…
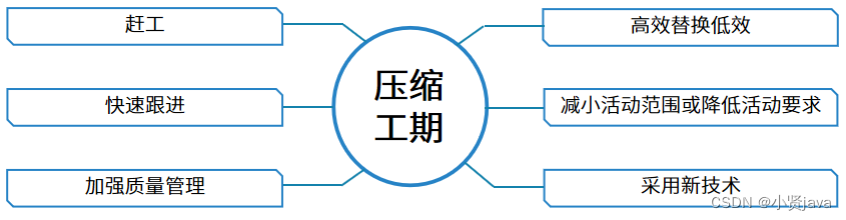
高项备考葵花宝典-项目进度管理输入、输出、工具和技术(下,很详细考试必过)
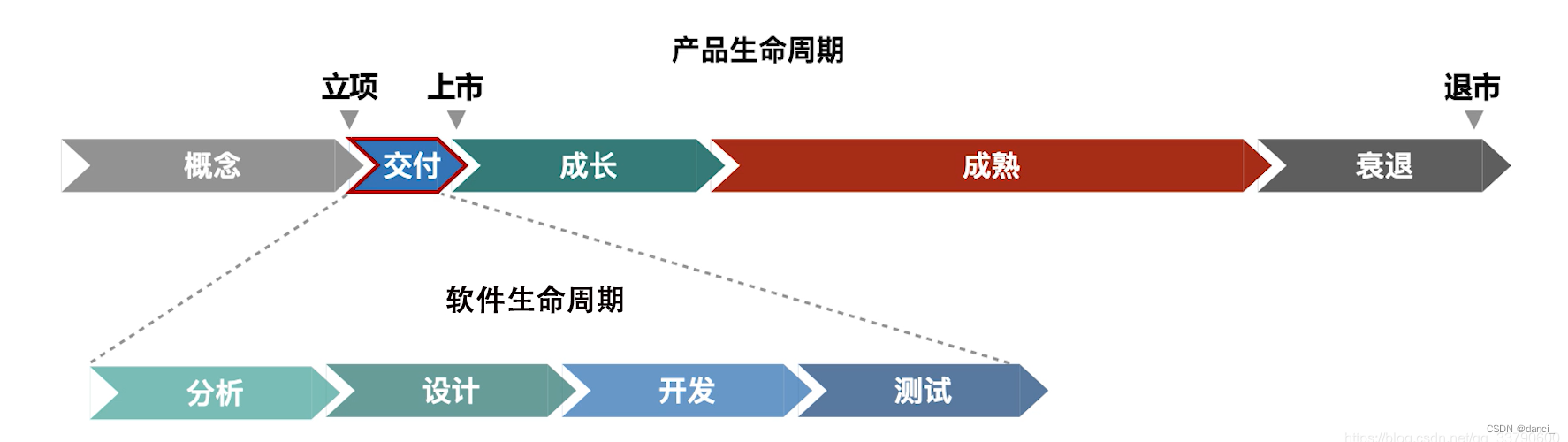
项目进度管理的目标是使项目按时完成。有效的进度管理是项目管理成功的关键之一,进度问题在项目生命周期内引起的冲突最多。 小型项目中,定义活动、排列活动顺序、估算活动持续时间及制定进度模型形成进度计划等过程的联系非常密切,可以视为一…
【Python Threading 学习笔记】5、不一定有效率GIL
往期内容:
1、什么是多线程?
2、添加线程
3、join功能
4、Queue功能
0x00 关于GIL
GIL的全称是Global Interpreter Lock(全局解释器锁),来源是python设计之初的考虑,为了数据安全所做的决定。
每个CPU在同一时间只能执行一…
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-1+2](https://img-blog.csdnimg.cn/direct/1eb0c3c819a841db808d26d9f452f2ab.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-1+2
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-12 1. Recursive Algirithm 递归算法2. Data Fusion 数据融合Covarince Matrix协方差矩阵State Space状态空间方程 Observation观测器 1. Recursive Algirithm…
高项备考葵花宝典-项目进度管理核心方法加强理解-关键路径法
关键路径法(Critical Path Method,CPM)是一种基于数学计算的项目计划管理方法,是网络图计划方法的一种,属于肯定型的网络图。关键路径法将项目分解成为多个独立的活动并确定每个活动的工期,然后用逻辑关系&…
递归算法学习——电话号码的字母组成,括号生成,组合
目录 一,电话号码的字母组合
1.题意
2.例子
3.题目接口 4.解题代码和思路
代码:
思路:
二,括号的生成
1.题意
2.例子
3.题目接口
四,解题代码和思路
1.先写代码:
2.思路
三,组合
…
探索设计模式的魅力:深入理解面向对象设计的深层原则与思维
如何同时提高一个软件系统的可维护性 和 可复用性是面向对象对象要解决的核心问题。 通过学习和应用设计模式,可以更加深入地理解面向对象的设计理念,从而帮助设计师改善自己的系统设计。但是,设计模式并不能够提供具有普遍性的设计指导原则。…

MyBatis学习笔记(一)入门
原文地址为:
MyBatis学习笔记(一)入门首先给大家推荐几个网页:
http://blog.csdn.net/isea533/article/category/2092001 没事看看 - MyBatis工具:www.mybatis.tk
http://www.mybatis.org/mybatis-3/zh/getting-started.html…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-2 特征值与特征向量](https://img-blog.csdnimg.cn/direct/cf42199f4ae54bc7952ea569c3524713.png)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-2 特征值与特征向量
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-2 特征值与特征向量 1. 定义1.1 线性变换1.2 求解特征值,特征向量1.3 应用:对角化矩阵——解耦Decouple 2. Summary 1. 定义 A v ⃗ λ v ⃗ A\vec{v}\lambd…
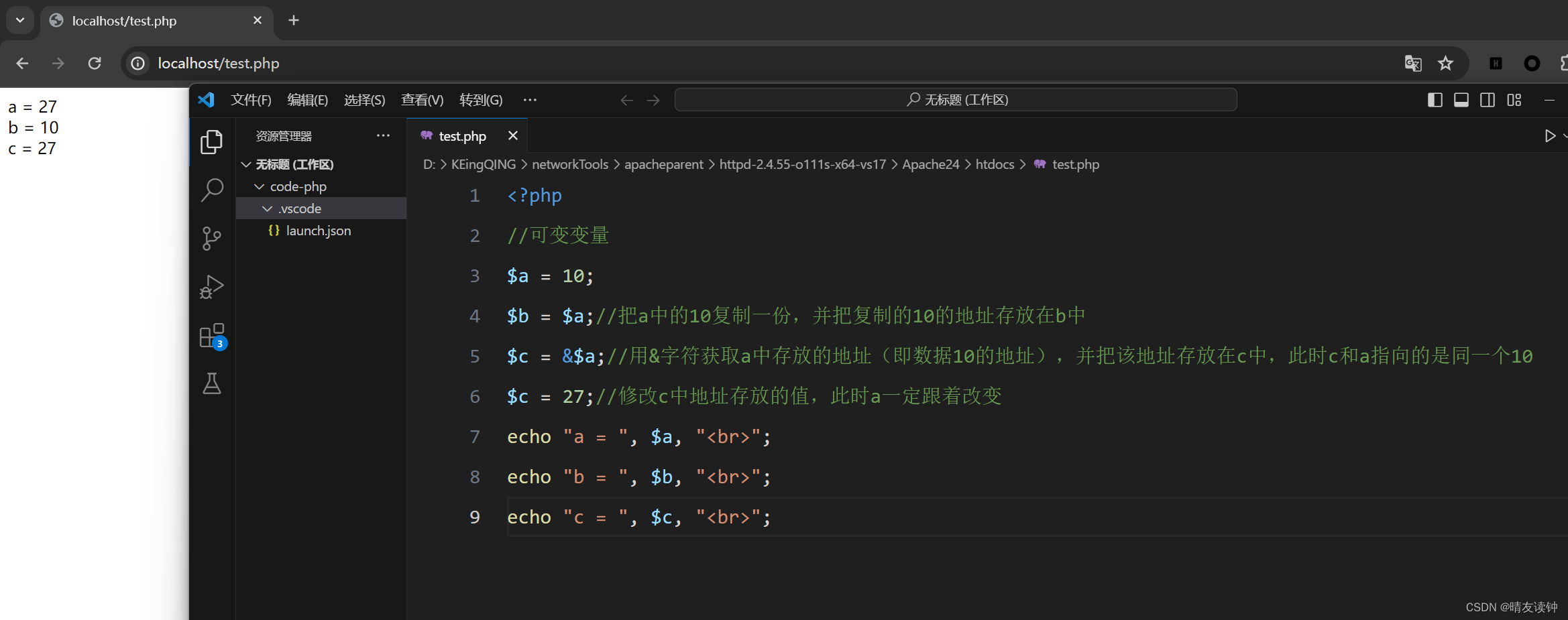
php基础学习之匿名函数
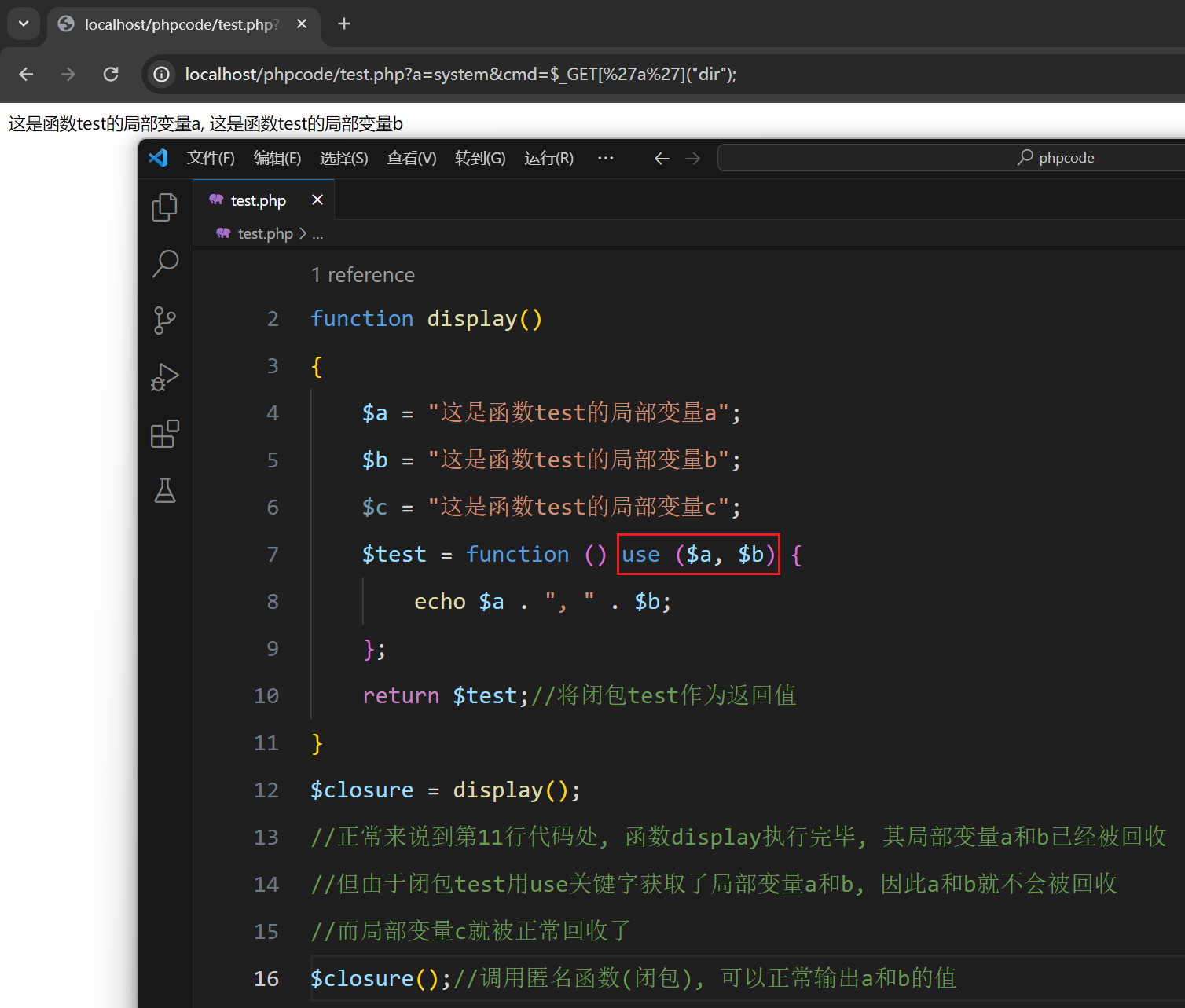
匿名函数 描述 允许临时创建一个没有指定名称的函数,使用匿名函数可以方便地创建一次性或临时的功能块。 语法 function (){ //函数体 }; 样例 (注:匿名函数定义后,需要将其赋值给一个变量,然后通过该变量来调用 这种调…
JavaScript学习笔记(一) 导论
目录
一、什么是 JavaScript 语言?
二、为什么学习 JavaScript?
1.操控浏览器的能力
2.广泛的使用领域
(1)浏览器的平台化
(2)Node
(3)数据库操作
(4)移动平台开发
(5)内嵌脚本语言
(6)跨平台的桌面应用程序
3.易学性
(1)学习环境无处不在 …
动态规划学习——斐波那契数列
目录
最长的斐波那契数列子序列的长度
1.题目
2.题目接口
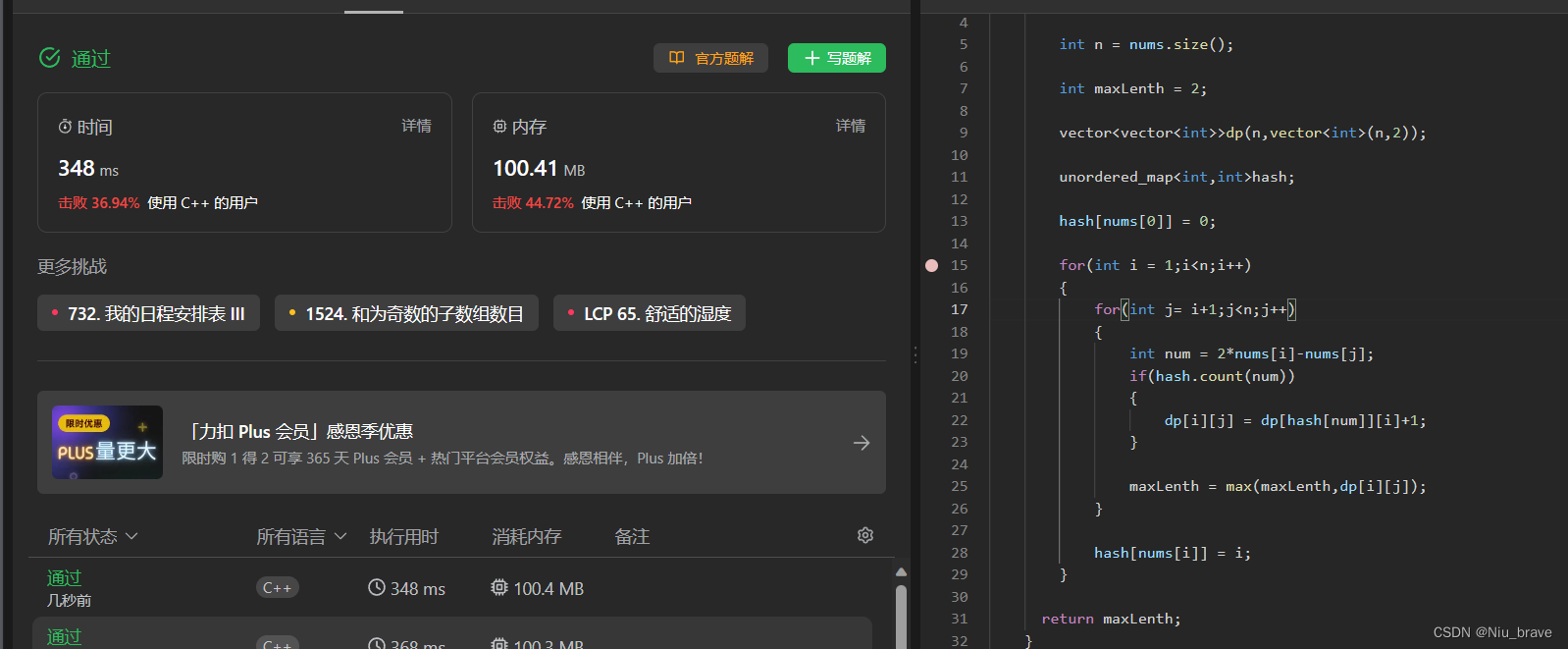
3.解题思路及其代码 最长的斐波那契数列子序列的长度
1.题目 如果序列x_1,X_2,...,x_n 满足下列条件,就说它是斐波那契式的: 1.n > 3 2.对于所有i2 <n&a…

Java入门高频考查基础知识8(腾讯18问1.5万字参考答案)
刷题专栏:http://t.csdnimg.cn/gvB6r Java 是一种广泛使用的面向对象编程语言,在软件开发领域有着重要的地位。Java 提供了丰富的库和强大的特性,适用于多种应用场景,包括企业应用、移动应用、嵌入式系统等。 以下是几个面试技巧&…
Linux shell编程学习笔记30:打造彩色的选项菜单
1 需求分析
在
Linux shell编程学习笔记21:用select in循环语句打造菜单https://blog.csdn.net/Purpleendurer/article/details/134212033?spm1001.2014.3001.5501 中,我们利用select in循环语句打造的菜单中,菜单项都是用系统设置的颜色配…
动态规划学习——等差子序列问题
目录
一,最长等差子序列
1.题目
2.题目接口
3.解题思路及其代码
二,等差序列的划分——子序列
1.题目
2.题目接口
3.解题思路及其代码 一,最长等差子序列
1.题目 给你一个整数数组 nums,返回 nums 中最长等差子序列的长度…

MYSQL8用户权限配置详解
单位的系统性能问题需要把Mysql5升级到Mysql8,需要用到Mysql8的一些特性来提升系统的性能。 配置用户权限过程中发现一些问题,学习并记录一下。 目录
一、环境
二、MySQL8 用户权限
2.1 账号管理权限
2.1.1 连接数据库
2.1.2 账号权限配置
2.2 密码…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-5稳定性stability-李雅普诺夫Lyapunov](https://img-blog.csdnimg.cn/direct/65aa33ac3c73453fa8e3336d3057237d.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-5稳定性stability-李雅普诺夫Lyapunov
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-5稳定性stability-李雅普诺夫Lyapunov Stability in the sense of Lyapunov
Assympototic Stability
JavaScript学习笔记(二) 基本语法
目录
一、语句
二、变量
1.概念
2.变量提升
3.标识符
4.注释
5.区块
6.条件语句
(1)if结构
(2)if...else 结构
(3)switch 结构
(4)三元运算符 ?:
7.循环语句
(1)while 循环
(2)for 循环
(3)do...while 循环
(4)标签(label) 一、语句
JavaScript 程序的执行单…

Linux crontab命令定时任务详解
crond是Linux系统中用来定期执行命令或指定程序任务的一种服务或软件,与Windows下的计划任务类似。当安装完成操作系统后,默认会安装此服务工具,并且会自动启动crond进程。crond进程每分钟会定期检查是否有要执行的任务,如果有要执…
Eject Chain与可变路径在组合优化旅行商问题中的应用
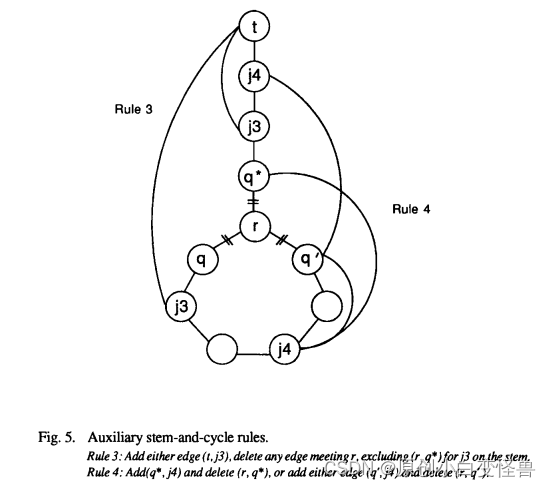
Eject Chain与可变路径在组合优化旅行商问题中的应用 前言Eject Chain 算法弹射链中 cycle and stem 的结构介绍Subpath Election Method 一些基础的 STEM-AND-CYCLE RULES结论、分析和结束语参考文献 前言
在经典组合优化问题中的优秀算法自从上个世纪九十年代以来࿰…
![[足式机器人]Part4 南科大高等机器人控制课 CH12 Robotic Motion Control](https://img-blog.csdnimg.cn/direct/8ffe8185e656438199a55465b404d4de.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 CH12 Robotic Motion Control
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 课程链接 : https://www.wzhanglab.site/teaching/mee-5114-advanced-control-for-robotics/ 南科大高等机器人控制课 Ch12 Robotic …
操作系统概述——简单总结
一、操作系统的作用
通过资源管理提高计算机系统的效率
改善人机界面向用户提供友好的工作环境
二、操作系统的特征
并发性、共享性、虚拟性、不确定性。
三、操作系统的功能
进程管理、存储管理、文件管理、设备管理、作业管理、
四、操作系统的分类
批处理操作系统
…
MyBatisPlus学习笔记三-核心功能
接上篇:
MyBatisPlus学习笔记二-CSDN博客
1、核心功能-IService开发基础业务接口
1.1、介绍 1.2、引用依赖 1.3、配置文件 1.4、用例-新增 1.5、用例-删除 1.6、用例-根据id查询 1.7、用例-根据ids查询 2、核心功能-IService开发复杂业务接口 2.1、实例-更新 3、…

数据驱动的图像分类方式:K最近邻与线性分类器
最邻近规则分类器KNN
简单描述:首先在n个数据集中指定m个分类,这是学习过程。在使用中,对于新输入的数据,计算其k范围内,或者最邻近的k个点,根据多数表决规则,决定其属于m分类中的哪个分类。
…

修改和调试 onnx 模型
1. onnx 底层实现原理
1.1 onnx 的存储格式
ONNX 在底层是用 Protobuf 定义的。Protobuf,全称 Protocol Buffer,是 Google 提出的一套表示和序列化数据的机制。使用 Protobuf 时,用户需要先写一份数据定义文件,再根据这份定义文…
MYSQL数字函数详解和实战
MySQL提供了许多数字函数,用于对数字进行各种计算和处理。以下是一些常用的MySQL数字函数。 内容有点多,建议收藏以备后续用到查阅参考。 目录
一、SIGN 取数字的符号
二、ABS 取绝对值
三、COS 取余弦值
四、ACOS 取反余弦值
五、SIN 取正弦值
六…

统计学习方法学习笔记——概论(一)
# 文章内容来自学习李航老师的《统计学习方法》后的总结,相当于学习笔记,若有不正确的地方还请大家指正。# 所需先验知识:概率论与数理统计、线性代数一、 统计学习概述可能有些小伙伴没有听过统计学习,但是我相信机器学习大家一定…
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-6频率响应与滤波器](https://img-blog.csdnimg.cn/direct/f9a8fa930fc6421dbcd62135ce82cce5.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-6频率响应与滤波器
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-6频率响应与滤波器 1st order system 一阶系统 低通滤波器——Loss Pass Filter
递归算法学习——N皇后问题,单词搜索
目录
编辑 一,N皇后问题
1.题意
2.解释
3.题目接口
4.解题思路及代码
二,单词搜索
1.题意
2.解释
3.题目接口
4.思路及代码 一,N皇后问题
1.题意 按照国际象棋的规则,皇后可以攻击与之处在同一行或同一列或同一斜线上…
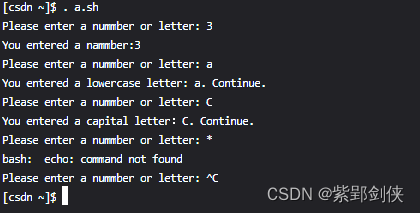
Linux shell编程学习笔记21:用select in循环语句打造菜单
一、select in循环语句的功能
Linux shell脚本编程提供了select in语句,这是 Shell 独有的一种循环语句,非常适合终端(Terminal)这样的交互场景,它可以根据用户的设置显示出带编号的菜单,用户通过输入不同…
【GAMES202】Real-Time Environment Mapping1—实时环境光照1
一、Distance field soft shadows Inigo Quilez :: computer graphics, mathematics, shaders, fractals, demoscene and more (iquilezles.org) 在开始我们的实时环境光照之前,我们再说一种现在的实现实时软阴影的方式,也就是Distance field soft shado…
递归下降语法分析 实验实现(电子科技大学编译技术Icoding实验)
现在前面:
由于本人对编译技术并无兴趣(我觉得我这种数字动漫方向的根本没必要做实验😅),所以只完成最基本的 Icoding 上的内容,而全部非终结符对应函数的实现,我实在无心也无力,完…
php基础学习之常量
php常量的基本概念
常量是在程序运行中的一种不可改变的量(数据),常量一旦定义,通常不可改变(用户级别)。 php常量的定义形式
使用define函数:define("常量名字", 常量值);使用cons…
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-5+6](https://img-blog.csdnimg.cn/direct/3ec3f5756ce14450b76d20641d9ce807.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-5+6
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-56 5. An Example 2D例子6. Extended Kalman Filter扩展卡尔曼滤波器(EKF) 5. An Example 2D例子 6. Extended Kalman Filter扩展卡尔曼…

Linux shell编程学习笔记45:uname命令-获取Linux系统信息
0 前言
linux 有多个发行版本,不同的版本都有自己的版本号。
如何知道自己使用的Linux的系统信息呢?
使用uname命令、hostnamectl命令,或者通过查看/proc/version文件来了解这些信息。
我们先看看uname命令。
1 uname 命令的功能和格式 …
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-8 状态观测器设计 Linear Observer Design](https://img-blog.csdnimg.cn/direct/3ae9839c835048658a5f7b85342012d0.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-8 状态观测器设计 Linear Observer Design
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-8 状态观测器设计 Linear Observer Design
操作系统概念学习笔记 10 CPU调度
操作系统概念学习笔记 10
CPU调度 多道程序操作系统的基础。通过在进程之间切换CPU,操作系统可以提高计算机的吞吐率。对于单处理器系统,每次只允许一个进程运行:任何其他进程必须等待,直到CPU空闲能被调度为止。
多道程序的目标…

Spring In Action 学习笔记(二)
个人学习Spring In Action学习笔记系列 (二)
源码地址 https://github.com/spring-projects/spring-framework U2 基本的Bean装配 在Spring中,组件无须自己负责与其他组件的关联,容器负责把协作组件的引用给予各个组件。例如,订单管理组件需…

C1认证学习笔记(第一章)
C1认证(一)——计算机通识:进制转换:进制定义:进制之间的转换:任务训练练习:信息单位:单位定义:换算公式:任务训练练习:数据校验:任务…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-3线性化Linearization](https://img-blog.csdnimg.cn/direct/272e51ba6b694e7da6bb320e03bf6620.png)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-3线性化Linearization
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-3线性化Linearization 1. 线性系统 Linear System 与 叠加原理 Superposition2. 线性化:Taylor Series3. Summary 1. 线性系统 Linear System 与 叠加原理 Superposition…

Linux shell编程学习笔记38:history命令
目录
0 前言 1 history命令的功能、格式和退出状态1.1 history命令的功能1.2 history命令的格式1.3退出状态2 命令应用实例2.1 history:显示命令历史列表2.2 history -a:将当前会话的命令行历史追加到历史文件~/.bash_history中2.3 history -c…
汇总记录Python常用的基础内置方法
这里汇总记录一些Python常用的基础内置方法
(参照哔站有一个大佬"小飞有点东西"的笔记整理记录而得,仅限方便需要的时候可以直接在网上搜索查阅而整理记录)
输出/输入
print()
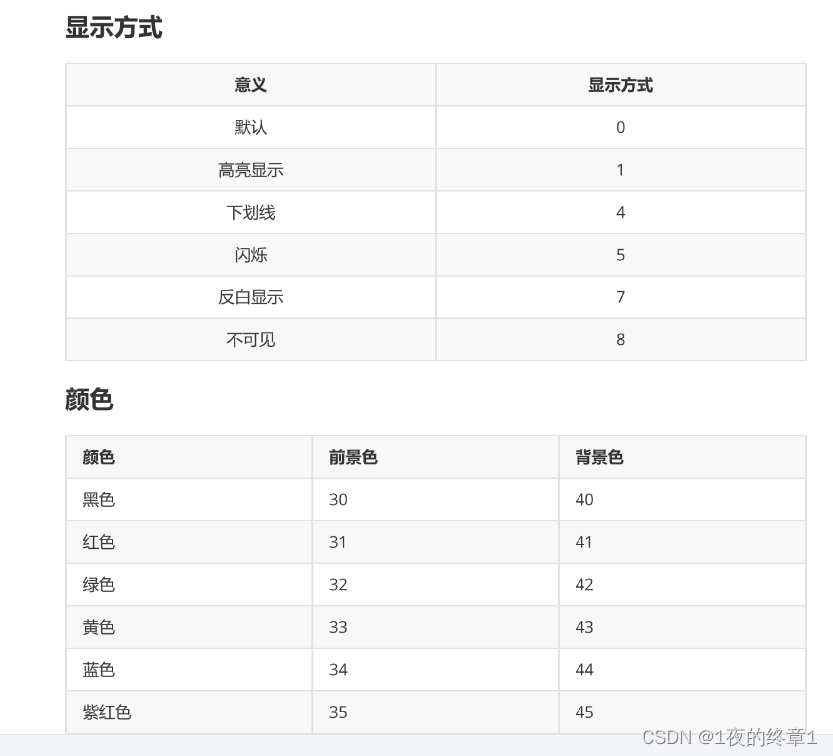
input()print打印颜色设置 显示方式;前景颜色;背景颜色,这3个…
【学习笔记】C#基础 - 由C/C++衍生出来的面向对象的编程语言
一、程序结构
1、基本语法
using System; // C#程序第一条语句都是 using System;
// using 关键字(可多个):在程序中包含命名空间namespace RectangleApplication // namespace 声明(可多个):包含一系列…
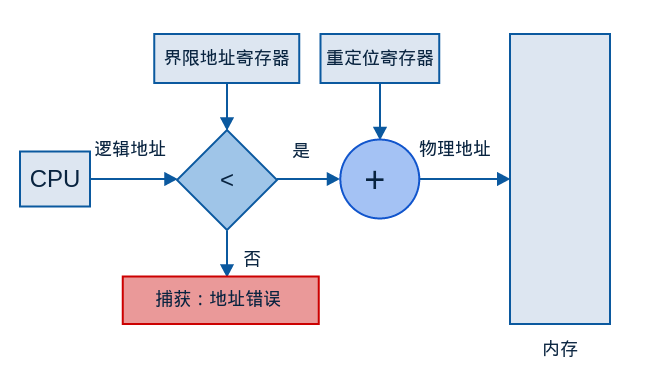
操作系统概念学习笔记 15 内存管理(一)
操作系统概念学习笔记 15
内存管理(一) 背景
内存是现代计算机运行的中心。内存有很大一组字或字节组成,每个字或字节都有它们自己的地址。CPU根据程序计数器(PC)的值从内存中提取指令,这些指令可能会引起…
Shell学习笔记一
为什么在写shell脚本的时候,需要在开头加上“#! /bin/sh”字样? Linux默认使用/bin/sh来执行shell脚本,但同时,现行的Linux发行版本几乎都携带着两个以上的shell,如/bin/bash、/bin/csh、/bin/zsh等,不可否…
原型、原型链学习笔记
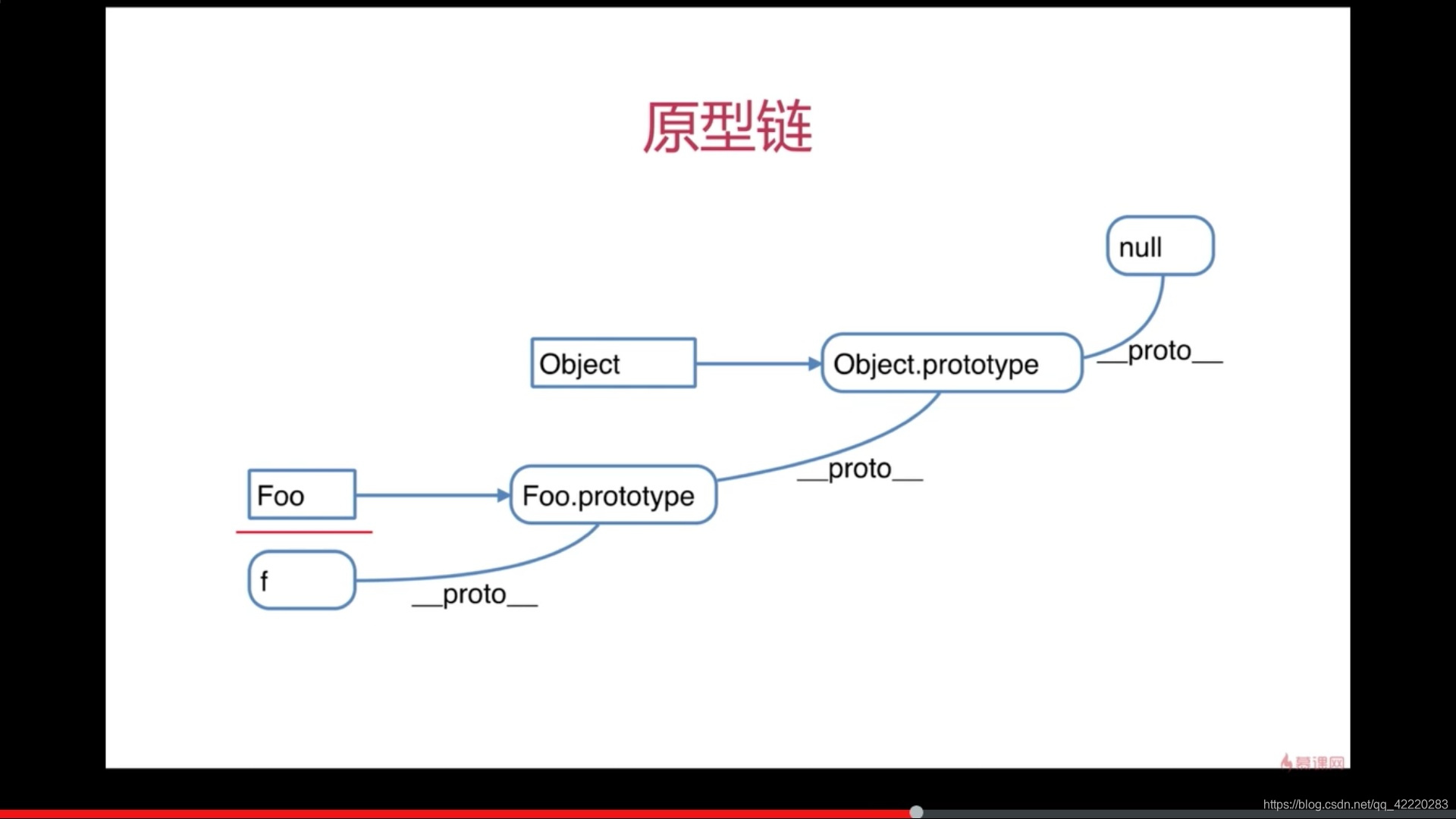
//构造函数
function Foo(name,age){ this.name name; this.age age //return this 默认有这行(能new构造也是因为return 的是this) } var f new Foo(‘lice’,18)
var a {},其实就是var a new Object(); 同理 var a [],就是 var a …

Linux shell编程学习笔记29:shell自带的 脚本调试 选项
Linux shell脚本的调试方法比较多,上次我们探讨和测试了shell内建命令set所提供的一些调试选项,其实 shell 本身也提供了一些调试选项。我们以bash为例来看看。
1 bash 的命令行帮助信息(bash --help) purleEndurer csdn ~ $ ba…
【GAMES202】Real-Time Ray Tracing 1—实时光线追踪1
一、前言 这篇我们开始新的话题—Real-Time Ray Tracing简称RTRT,也就是实时光线追踪,关于光线追踪,我们已经不止一次提到过它的优点,无论是软阴影还是全局光照,光线追踪都很容易做,唯一的缺点就是速度太慢…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-4线性时不变系统中的冲激响应与卷积](https://img-blog.csdnimg.cn/direct/608097c53cc44d0d9da9a115597e59ce.png)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-4线性时不变系统中的冲激响应与卷积
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-4线性时不变系统中的冲激响应与卷积 1. LIT System:Linear Time Invariant2. 卷积 Convolution3. 单位冲激 Unit Impulse——Dirac Delta 线性时不变系统 : L…

Linux shell编程学习笔记24:函数定义和使用
为了实现模块化设计和代码重用,很多编程语言支持函数或过程,Linux shell也支持函数定义和调用。
Linux shell中的函数与其它编程语言很多有相似之处,也有自己独特之处。
1 函数的定义
1.1 标准格式
function 函数名(){语句或命令1……语句…
![[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4](https://img-blog.csdnimg.cn/direct/9aa076c4e486415a9f13facd707e0aba.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-34 3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导4. Priori/Posterrori error Covariance Martix 误差协方差矩阵 3. Step by step :…
流畅的Python第二章-学习笔记
"""
Python的内置序列:
1.按类型分类: 1.容器序列:list、tuple 和 collections.deque 这些序列能存放不同类型的数据 2.扁平序列: str、bytes、bytearray、memoryview 和 array.array,这类序列只能容纳一种类型 容器序列存放…

SEO的道与术(笔记分享)
分享一个学习SEO的笔记,自己在学习的时候整理的,希望能帮助到刚刚学习的朋友。公司业务有涉及,所以自己也就学习了一下,也在帮客户做了一个网站的SEO优化。 SEO的道是SEO优化策略层面的东东,术是具体的优化手法&#…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-10奈奎斯特稳定性判据-Nyquist Stability Criterion](https://img-blog.csdnimg.cn/direct/0d4633f990284b3195ec45cf02c2c0eb.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-10奈奎斯特稳定性判据-Nyquist Stability Criterion
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-10奈奎斯特稳定性判据-Nyquist Stability Criterion Cauchy’s Argument Priciple 柯西幅角原理 结论: s s s平面内顺时针画一条闭合曲线 A A A, B B B曲…
[足式机器人]Part2 Dr. CAN学习笔记-Ch01自动控制原理
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Ch01自动控制原理 1. 开环系统与闭环系统Open/Closed Loop System1.1 EG1: 烧水与控温水壶1.2 EG2: 蓄水与最终水位1.3 闭环控制系统 2. 稳定性分析Stability2.1 序言2.2 稳定的分类2.3 稳定的对…
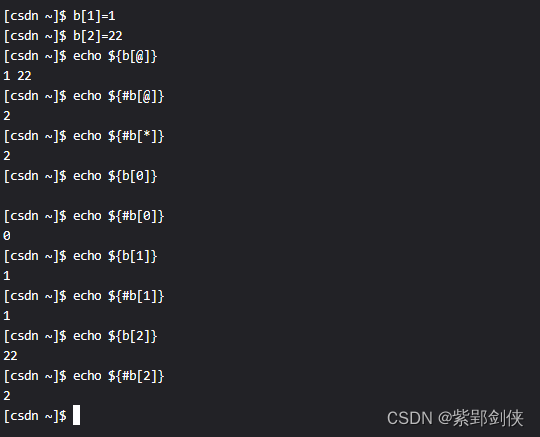
Linux shell编程学习笔记15:定义数组、获取数组元素值和长度
一、 Linux shell 脚本编程中的数组概述
数组是一种常见的数据结构。跟大多数编程语言一样,大多数Linux shell脚本支持数组,但对数组的支持程度各不相同,比如数组的维度,是支持一维数组还是多维数组?再如,…
MYSQL字符串函数详解和实战(字符串函数大全,内含示例)
MySQL提供了许多字符串函数,用于处理和操作字符串数据。以下是一些常用的MYSQL字符串函数。 建议收藏以备后续用到查阅参考。 目录
一、CONCAT 拼接字符串
二、CONCAT_WS 拼接字符串
三、SUBSTR 取子字符串
四、SUBSTRING 取子字符串
五、SUBSTRING_INDEX 取子…
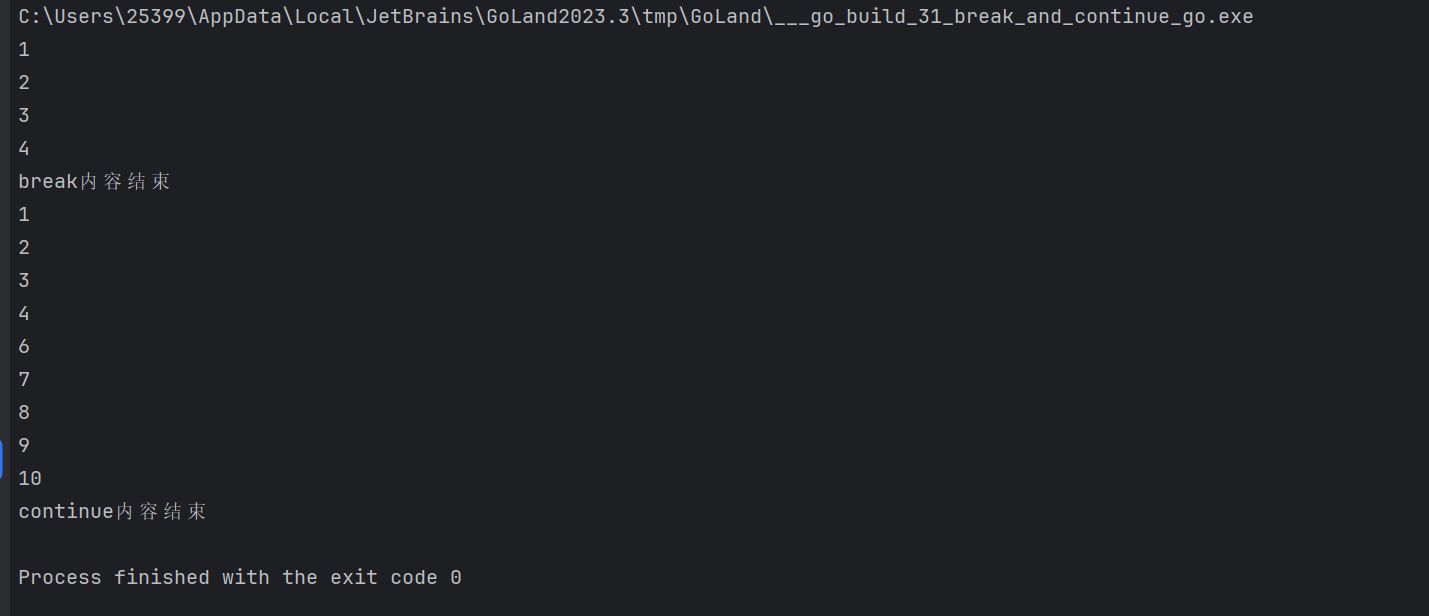
Linux shell编程学习笔记20:case ... esac、continue 和break语句
一、case ... esac语句说明
在实际编程中,我们有时会请到多条件多分支选择的情况,用if…else语句来嵌套处理不烦琐,于是JavaScript等语言提供了多选择语句switch ... case。与此类似,Linux Shell脚本编程中提供了case...in...esa…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma](https://img-blog.csdnimg.cn/direct/cc78b19f146c4185a1082da5319042ac.png)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-9阈值选取-机器视觉中应用正态分布和6-sigma 5M1E——造成产品质量波动的六因素 人 Man Manpower 机器 Machine 材料 Material 方法 Method 测量 Measurment 环境 Envrionment
DMAI…
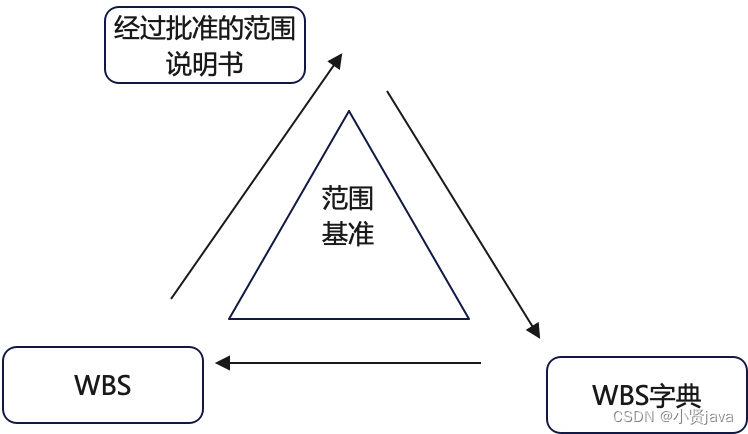
高项备考葵花宝典-项目范围管理输入、输出、工具和技术
项目范围管理包括确保项目“做”且“只做”所需的全部工作(即不能少做,也不能多做,如果多做,就要消耗团队额外的时间和资源,并且无法被认可),以成功完成项目。项目范围管理主要在于定义和控制哪…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-3.5连续系统离散化](https://img-blog.csdnimg.cn/direct/1e6e67967c1844f799bdd383768e8fda.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-3.5连续系统离散化
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-3.5连续系统离散化
![[Linux系统编程/网络编程] 笔记目录](https://img-blog.csdnimg.cn/20210422195208661.jpg?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80NDk3Mjk5Nw==,size_16,color_FFFFFF,t_70)
[Linux系统编程/网络编程] 笔记目录
距离上一次利用高并发技术实现360度行车记录仪功能已经过去挺久了。着手写一系列关于系统编程和网络编程内容进行总结回顾。 温故而知新,希望大家给出指点建议。 Linux系统编程 [Linux系统编程]文件IO(一) [Linux系统编程]进程&#…
php基础学习之变量
php使用变量的必要性
PHP 是一种动态网站开发的脚本语言,动态语言特点是交互性,会有数据的传递,而 PHP作为“中间人”,需要进行数据的传递,传递的前提就是 PHP 能自己存储数据(临时存储) php变量的命名规则
必须以do…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-12+13 不变性原理+非线性系统稳定设计](https://img-blog.csdnimg.cn/direct/bbb4a17c011f4e99b98bd158372c3a4f.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-12+13 不变性原理+非线性系统稳定设计
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-1213 不变性原理非线性系统稳定设计 1. Invariance Princilpe-LaSalle;s Theorem不变性原理2. Nonlinear Basic Feedback Stabilization 非线性系统稳定设计 1. Invarianc…
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-7二阶系统](https://img-blog.csdnimg.cn/direct/7f1982b78d7f4338becc106b80a464f0.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-7二阶系统
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-7二阶系统 1. 二阶系统对初始条件的动态响应 Matlab/Simulink - 2nd Order Syetem Response to IC2. 二阶系统的单位阶跃响应 2nd Order System Unit Step Response3. 二…
【Python Threading 学习笔记】4、Queue功能
往期内容:
1、什么是多线程?
2、添加线程
3、join功能
0x00 关于Queue
queue模块实现了各种【多生产者-多消费者】队列,可用于在执行的多个线程之间安全的交换信息。
queue的常用方法:
q.size():返回队列的正确…
【Python Threading 学习笔记】3、join功能
往期内容:
1、什么是多线程?
2、添加线程
0x00 不使用join()的结果
首先在上一节的示例基础上进行简单修改 import time
import threadingdef thread_jobs(): # 定义要添加的线程print(任务1开始\n)for i in range(10):time.sleep(0.1)print(任务1结…
【Python Threading 学习笔记】2、添加线程
往期内容: 1、什么是多线程?
这一节主要学习Threading模块的一些基本操作,如获取线程数,添加线程等。
首先导入Threading模块
import threading获取已激活的线程数
threading.active_count()查看所有线程信息
threading.enum…
半加器、全加器的实现和应用——《计算机科学概论》原书第七版 重点内容分析
门电路实现半加器和全加器的原理 门和电路问题分析半加器全加器 门和电路
如果想详细了解请访问门和电路——组合电路基本原理
问题分析
任何减法都可以转化为加法,对于二进制的加减法的运算可以查看二进制及原码、反码、补码《计算机科学概论》原书第七版 重点内…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-7Lead Compensator超前补偿器(调节根轨迹)](https://img-blog.csdnimg.cn/direct/105e56e5878941d5a652acbc8bc72eab.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-7Lead Compensator超前补偿器(调节根轨迹)
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-7Lead Compensator超前补偿器(调节根轨迹) 1. Plot Rootlocus 绘制根轨迹2. System Performance 系统表现3. 改善/加快收敛速度4. 超前补偿器 Lead Compe…
![[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析](https://img-blog.csdnimg.cn/direct/630219cc3a314904ba754366a8add31b.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记 - Ch02动态系统建模与分析
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Ch02动态系统建模与分析 1. 课程介绍2. 电路系统建模、基尔霍夫定律3. 流体系统建模4. 拉普拉斯变换(Laplace)传递函数、微分方程4.1 Laplace Transform 拉式变换4.2 收…
Linux shell编程学习笔记17:for循环语句
Linux Shell 脚本编程和其他编程语言一样,支持算数、关系、布尔、字符串、文件测试等多种运算,同样也需要进行根据条件进行流程控制,提供了if、for、while、until等语句。 之前我们探讨了if语句,现在我们来探讨for循环语句。
Li…
Go语言基础语法学习笔记[3]
数组: 声明: var variable_name [SIZE]variable_type 注意:数组长度是固定不能改变的 一维数组举例: var arr1 [10]int arr1[0] 10 var arr2 [5]int{1,2,3,4,5} var arr3 [...]int{1,2,3,4,5,6} fmt.P…

【PyTorch常用知识总结(一)】
目录0. 前言1. 常用基本操作1.1 创建tensor1.2 tensor的基本数据类型:torch.dtype1.3 改变tensor的基本数据类型:tensor.type()1.3 改变tensor形状:tensor.view()1.4 获得tensor的某个元素的值 : .item()1.5 tensor和ndarray互相转换1.5.1 tensor ---> ndarray: …
动态规划学习——通符串匹配,正则表达式
目录
编辑
一,通符串匹配
1.题目
2.题目接口
3,解题思路及其代码
二,正则表达 1.题目
2.题目接口
3.解题思路及其代码
三,交错字符串 1.题目
2,题目接口
3.解题思路及其代码 一,通符串匹配
1…
操作系统概念学习笔记 11 进程同步(一)
操作系统概念学习笔记 11
进程同步(一) 互相协作的进程之间有共享的数据,于是这里就有一个并发情况下,如何确保有序操作这些数据、维护一致性的问题,即进程同步。
从底层到高级应用,同步机制依次有临界区…

深度学习常用的python库学习笔记
文章目录 数据分析四剑客Numpyndarray数组和标量之间的运算基本的索引和切片数学和统计方法线性代数 PandasMatplotlibPIL 数据分析四剑客 Numpy
Numpy中文网 ndarray 数组和标量之间的运算 基本的索引和切片 数学和统计方法 线性代数 Pandas
Pandas中文网 Matplotlib
Mat…
操作系统概念学习笔记 14 死锁(二)
操作系统概念学习笔记 14
死锁(二) 死锁避免(deadlock-avoidance)
在上篇博客中讨论的死锁预防问题中,通过限制资源申请的方法预防死锁。这种限制保证4个必要条件之一不会发生,保证不会发生死…

考研机试准备--《王道论坛机试指南》学习笔记
一.代码能力培养的层次结构 1.会编写(默写)经典程序的代码。 2.将自己的想法和抽象的问题转换为代码实现。 3.编写出的代码在大量的,多种多样的测试用例之前仍然具有健壮性。 二.常见概念 1.特殊判题:表示该题有多个符合条件的题解…
探索设计模式的魅力:“感受单例模式的力量与神秘” - 掌握编程的王牌技巧
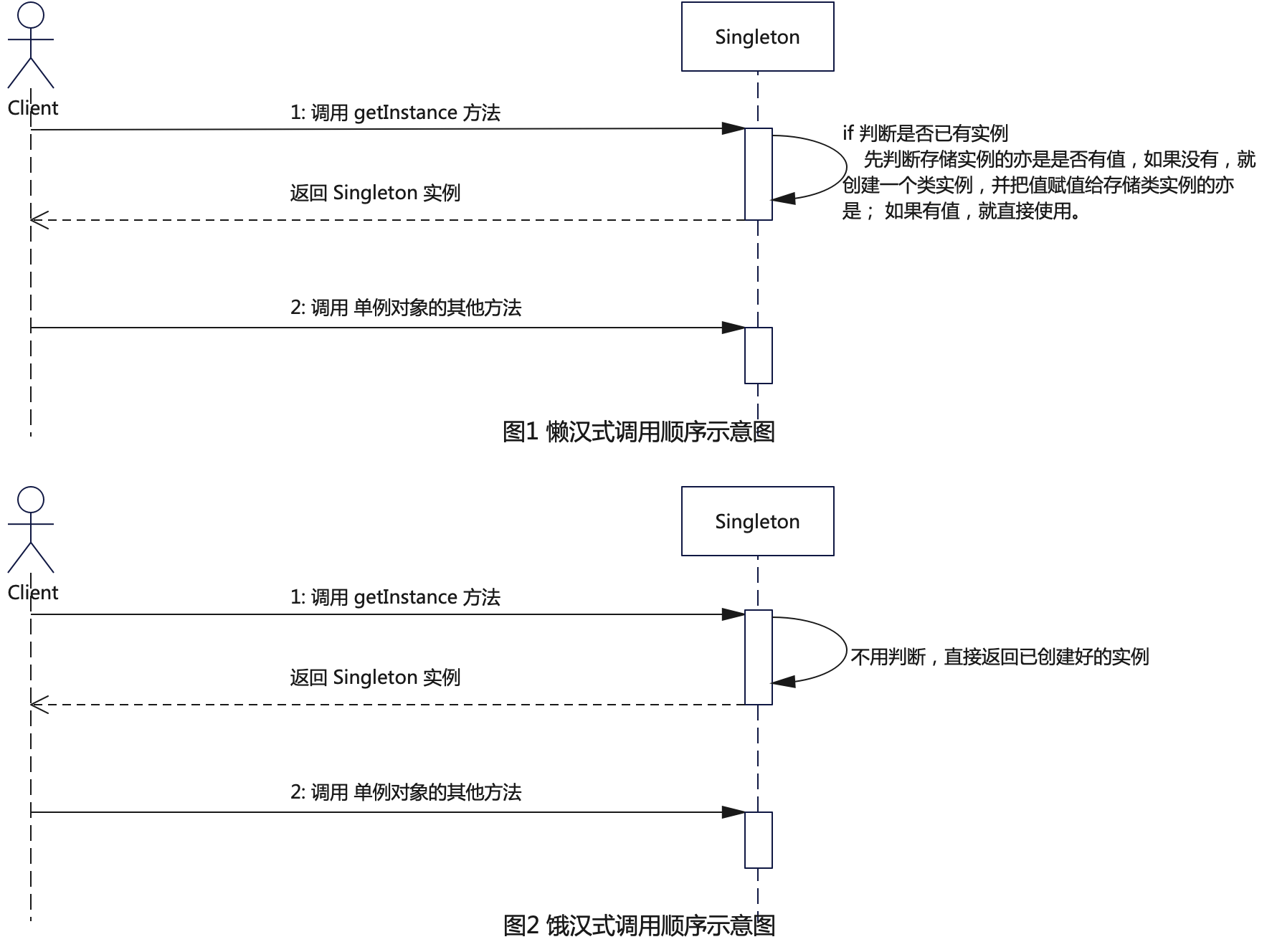
在软件开发的赛场上,单例模式以其独特的魅力长期占据着重要的地位。作为设计模式中的一员,它在整个软件工程的棋盘上扮演着关键性角色。本文将带你深入探索单例模式的神秘面纱,从历史渊源到现代应用,从基础实现到高级技巧…

西电_矩阵论_学习笔记
文章目录 【 第一章 线性空间 】【 第二章 范数 】【 第三章 矩阵函数 】【 第四章 矩阵分解 】【 第五章 矩阵特征值估计 】【 第六章 广义逆 】【 考试重点内容总结 】 这是博主2023春季西电所学矩阵论的思维导图(软件是幕布),供大家参考&a…
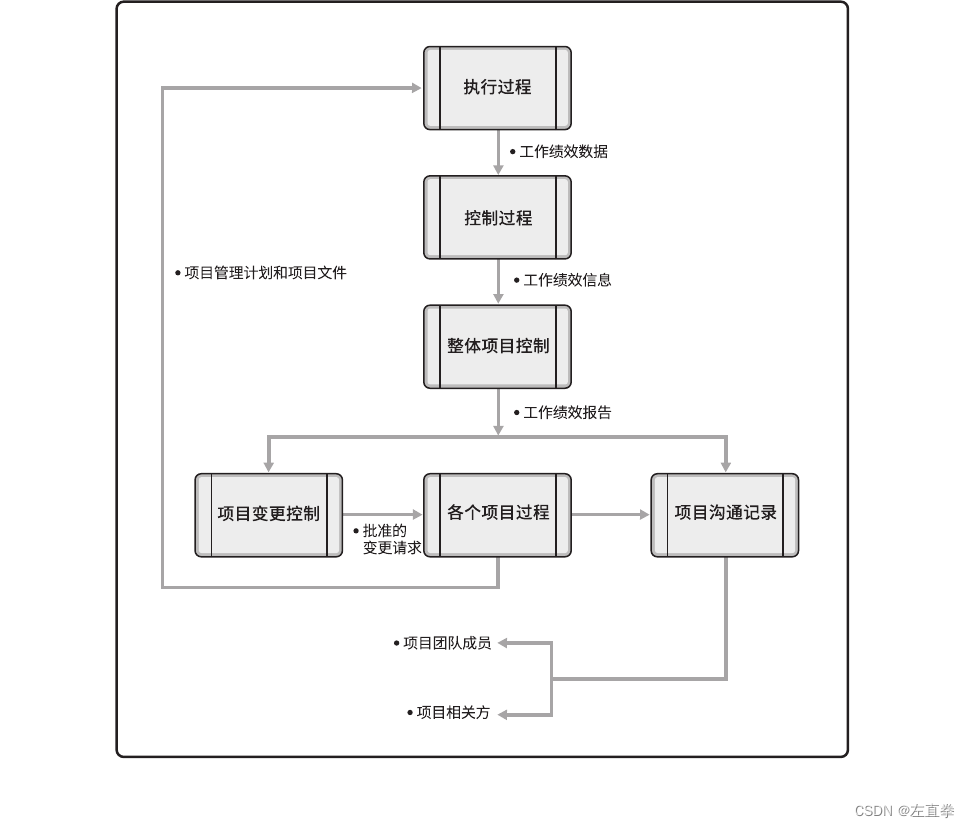
项目管理师基础之项目管理计划和项目文件
项目管理过程中,会使用并产生两大类文件:项目管理计划和项目文件。内容一般如下:
整个项目生命周期需要收集、分析和转化大量的数据。从各个过程收集项目数据,并在项目团队内共享。在各个过程中所收集的数据经过结合相关背景的分…
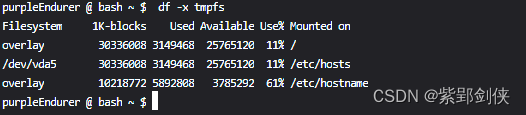
Linux shell编程学习笔记39:df命令
0 前言1 df命令的功能、格式和选项说明 1.1 df命令的功能1.2 df命令的格式1.3 df命令选项说明 2 df命令使用实例 2.1 df:显示主要文件系统信息2.2 df -a:显示所有文件系统信息2.3 df -t[]TYPE或--type[]TYPE:显示TYPE指定类型的文件系统信…
【CS学习笔记】8、客户端渗透的重点
0x00 前言
什么是客户端攻击
客户端攻击根据教程直译过来就是一种依靠应用程序使用控制端来进行的可视化攻击。
原文:A client-side attack is an attack against an application used to view attacker controlled content.
为什么要进行客户端攻击
随着时代发…
【GAMES202】Real-Time Global Illumination(in 3D)—实时全局光照(3D空间)
一、SH for Glossy transport
1.Diffuse PRT回顾 上篇我们介绍了PRT,并以Diffuse的BRDF作为例子分析了预计算的部分,包括Lighting和Light transport,如上图所示。 包括我们还提到了SH,可以用SH的有限阶近似拟合球面函数ÿ…
![[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标](https://img-blog.csdnimg.cn/direct/795a53af3e9143c7b8b4dc4861f83c39.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记- 最优控制Optimal Control Ch07-1最优控制问题与性能指标
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - 最优控制Optimal Control Ch07-1最优控制问题与性能指标

动态规划学习——回文串
目录 一,回文子串
1.题目
2.题目接口
3,解题代码及其思路
解题代码:
二, 分割回文串II
1,题目
2,题目接口
3,解题思路及其代码 一,回文子串
1.题目 给你一个字符串 s &…
【学习笔记】老王Python-基础篇 python 2.x 【推荐指数2星】
lesson-1
脚本解释型语言的内部机制 在运行脚本之前,得到结果之后 1.Python先将脚本编译成字节码 文件(pyc,pyo) 2.python虚拟机解释器解释并运行字节码文件
编译型语言的内部机制 1.先将源代码编译成机器码文件,生成可执行文件 2.运行可执行文件…
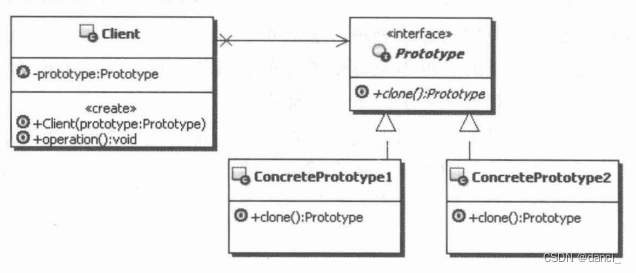
探索设计模式的魅力:一次设计,多次利用,深入理解原型模式的设计艺术
原型模式是一种设计模式,属于创建型模式的一种,它用于创建重复的对象,同时又能保持性能。在原型模式中,通过复制现有对象的原型来创建新对象,而不是通过实例化类来创建对象。这样做可以避免耗费过多的资源开销…
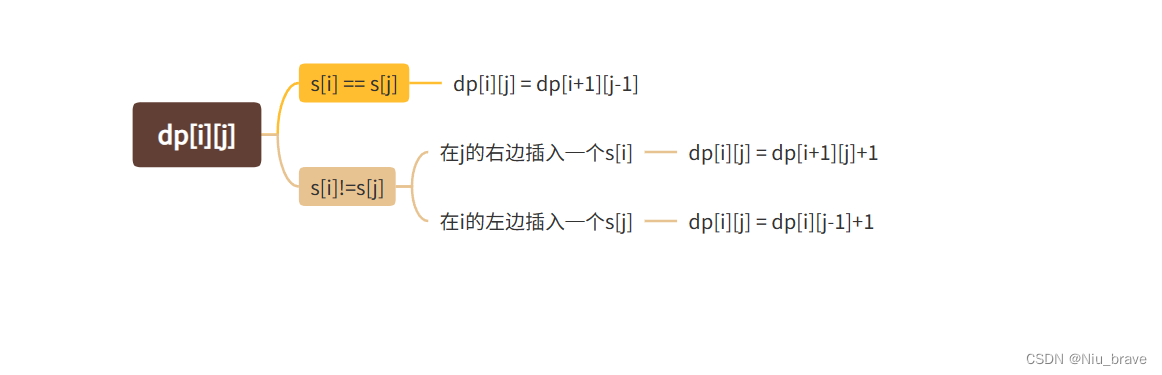
动态规划学习——最长回文子序列,让字符串变成回文串的最小插入次数
一,最长回文串
1.题目 给你一个字符串 s ,找出其中最长的回文子序列,并返回该序列的长度。 子序列定义为:不改变剩余字符顺序的情况下,删除某些字符或者不删除任何字符形成的一个序列。 示例 1: 输入&…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-6复数Complex Number](https://img-blog.csdnimg.cn/direct/eea83e223a6545cba98e00d77854952b.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-6复数Complex Number
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-6复数Complex Number x 2 − 2 x 2 0 ⇒ x 1 i x^2-2x20\Rightarrow x1\pm i x2−2x20⇒x1i
代数表达: z a b i , R e ( z ) a , I m ( z ) b zabi,\mathrm{Re}…
[计算机网络]物理层
参考视频:王道考研 计算机网络 参考博客:链接 记录了一些需要掌握了解的知识点,用于个人复习, Time:2021/04-20-21:51 第二章
2.1 通信基础
2.1.1物理层借口特性、数据通信模型、物理层基本概念
物理接口的特性1 机…
《Python编程从入门到实践》学习笔记详解-项目篇(API的使用)
上几篇介绍了《Python编程从入门到实践》的语法篇及2个项目篇。这篇文章介绍Python项目篇之API的使用。
#Python网络编程--API的使用#执行API调用并处理结果
import requests
urlhttps://api.githup.com/search/repositories?qlanguage:python&sortstars
rrequests.get(u…
金三银四-探秘Spring框架:挑战你对Java企业级开发的深度理解-基础篇1
又要快到一年一度的金三银四,开始复习啦~! 每天一点点。。 目录
一、Spring框架中的Bean生命周期是什么?
二、Spring中的依赖注入是如何工作的?
三、Spring框架中AOP的概念
四、Spring框架中的事务管理是如何实现的…

【模拟集成电路】反馈系统加载效应——基础到进阶(三)
【模拟集成电路】反馈系统加载效应——基础到进阶(三) -----------------------文末附往期文章链接-------------------- 1.概述2.二端口网络方法2.1二端口网络模型2.2电压-电压反馈的加载2.2电流-电压反馈的加载2.3电压-电流反馈的加载2.4电流-电流反馈…
Go语言基础语法学习笔记[1]
行分隔符: Go语言中,一行代表一个语句结束,不需要以分号“;”结尾,如果需要在一行写多个语句,则每个语句需要使用分号进行区分,不鼓励这样做。 注释: // 单行注释 /* 多行注释 */ 标识符&#x…
探索设计模式的魅力:一篇文章让你彻底搞懂建造者模式
建造者模式(Builder Pattern)是一种创建型设计模式,旨在将一个复杂对象的创建过程与其表示分离,使得同样的构建过程可以创建不同的表示形式。 主要角色: 产品(Product):表示正在构建…
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-3流体系统建模](https://img-blog.csdnimg.cn/direct/2e31fc16d6f94250a231b6dc8eeb2b9f.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-3流体系统建模
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-12课程介绍电路系统建模、基尔霍夫定律 流量 flow rate q q q m 3 / s m^3/s m3/s 体积 volume V V V m 3 m^3 m3 高度 heigh h h h m m m 压强 pressure p p p …

大神之路-起始篇 | 第16章.计算机科学导论之【网络安全】学习笔记
欢迎关注「全栈工程师修炼指南」公众号点击 👇 下方卡片 即可关注我哟!设为「星标⭐」每天带你 基础入门 到 进阶实践 再到 放弃学习!涉及 企业运维、网络安全、应用开发、物联网、人工智能、大数据 学习知识“ 花开堪折直须折,莫待无花空折…
pytorch 多卡训练相关概念
1、World,Rank,Local Rank
1.1 world
World可以认为是一个集合,由一组能够互相发消息的进程组成。 world size就表示这组能够互相通信的进程的总数。
1.2 rank
Rank可以认为是这组能够互相通信的进程在World中的序号。
1.3 local rank
…
Hibernate的环境搭建、Hibernate的CRUD和基础API
Hibernate
写在前面
作为一名大二的学生,在学习这些框架和一些知识点的时候,总是因为别的事情例如考试复习,学习别的科目,总会在学习知识的时候学一半就断了,等到自己再回来学习的时候,总是会出现“我是谁…

双指针问题——求只包含两个元素的最长连续子序列(子数组)
一,题目描述 你正在探访一家农场,农场从左到右种植了一排果树。这些树用一个整数数组 fruits 表示,其中 fruits[i] 是第 i 棵树上的水果 种类 。 你想要尽可能多地收集水果。然而,农场的主人设定了一些严格的规矩,你必…

tcp协议简述(tcp工作原理,tcp包头,三次握手四次挥手,syn攻击)
tcp协议简述(学习笔记)tcp:传输控制协议(Transmission Control Protocol)。tcp的主要职责和工作过程tcp包头详解三次握手为何非要进行三次握手?SYN攻击;四次挥手为什么进行四次挥手?tcp协议的特…
贪心算法学习——最大数
目录
编辑
一,题目
二,题目接口
三,解题思路级代码 一,题目 给定一组非负整数 nums,重新排列每个数的顺序(每个数不可拆分)使之组成一个最大的整数。 注意:输出结果可能非常大…

Linux shell编程学习笔记27:tput
除了stty命令,我们还可以使用tput命令来更改终端的参数和功能。
1 tput 命令的功能
tput 命令的主要功能有:移动更改光标、更改文本显示属性(如颜色、下划线、粗体),清除屏幕特定区域等。
2 tput 命令格式 tput [选…
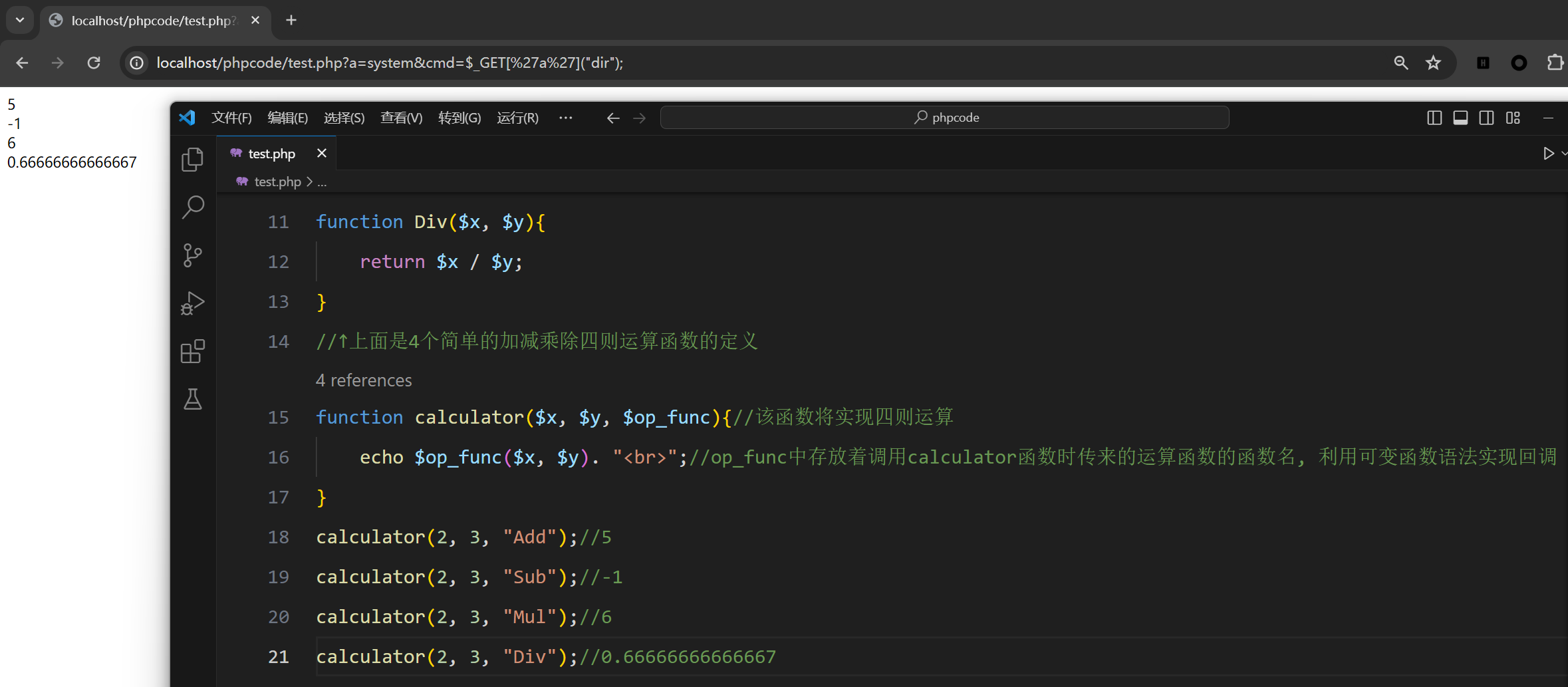
php基础学习之可变函数(web渗透测试关键字绕过rce于回调函数)
可变函数
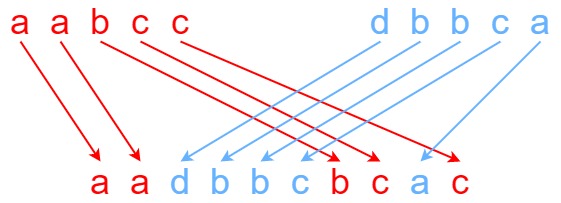
看可变函数的知识点之前,蒟蒻博主建议你先去看看php的可变变量,会更加方便理解,在本篇博客中的第五块知识点->php基础学习之变量-CSDN博客 描述 当一个变量所保存的值刚好是一个函数的名字(由函数命名规则可知该值必…
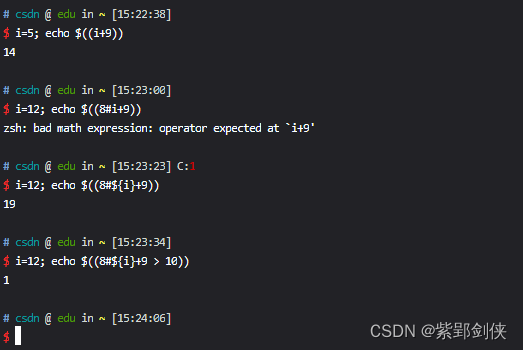
Linux shell编程学习笔记22: () $() (()) 的用法小结
最近学习Linux Shell编程,对 () (()) [] [[]]等符号的用法还是有点分不太清楚,于是决定再梳理一下。今天先整理 () $() (()) 的用法。
1 单小括号()
1.1 子shell(命令组) 括号中的命令将会新开一个子shell顺序执行,所…
2022全国职业技能大赛-网络安全赛题解析总结①(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路)模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全(40分)模块C CTF夺旗-攻击(20分)模块D…
Linux shell编程学习笔记1:关于shell的前世今生
一、什么是Shell? Shell英文单词的原意是“外壳”,在计算机领域专指在操作系统(Operating System)外层,提供用户界面(User Interface)的程序,主要负责将用户的命令(Comma…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System](https://img-blog.csdnimg.cn/direct/c8b811d78b0c43c7be47bd44f76ded14.png)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System EG1: 烧水与控温水壶EG2: 蓄水与最终水位闭环控制系统 EG1: 烧水与控温水壶 EG2: 蓄水与最终水位 h ˙ q i n A − g h A R \dot{…
冯诺依曼体系结构与进程的初步理解
目录 一,冯诺依曼体系结构
1.是什么?特点
2.为什么?
二,操作系统
三,进程
1.什么是进程?
2.查看进程 3.进程的管理
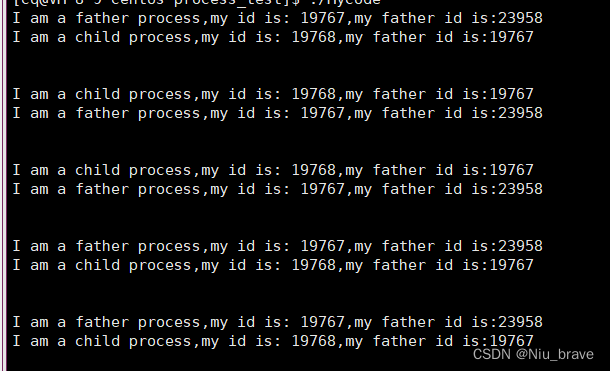
4.fork()创建子进程
1.fork()简介
2.fork()干了啥
3.fork()为什么会有两个返回…

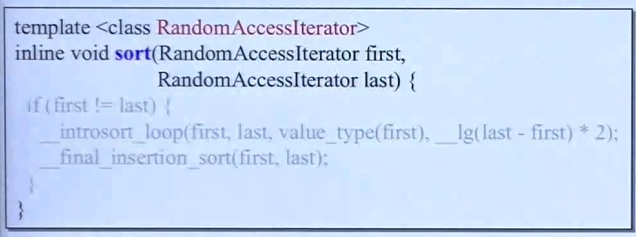
侯捷 C++ STL标准库和泛型编程 —— 8 适配器
8 适配器
适配器 Adapter 只是一个小变化,比如改个接口,函数名称等等其出现在三个地方:仿函数适配器,迭代器适配器,容器适配器可以使用继承 / 复合的两种方式实现,STL中都用复合 其思想就是将该记的东西记…
[STL]String基本用法解释+代码实例
C STL标准模板库的总结学习。文章中对于String的比较常见用法进行总结。 复习时间 2021-07-30 文章目录1 string 容器的特性1.1 string和char* 比较1.2 string 和 char* 的转换2 string初始化3 string拼接操作4 string查找和替换操作5 string 的比较操作6 string子串操作7 stri…
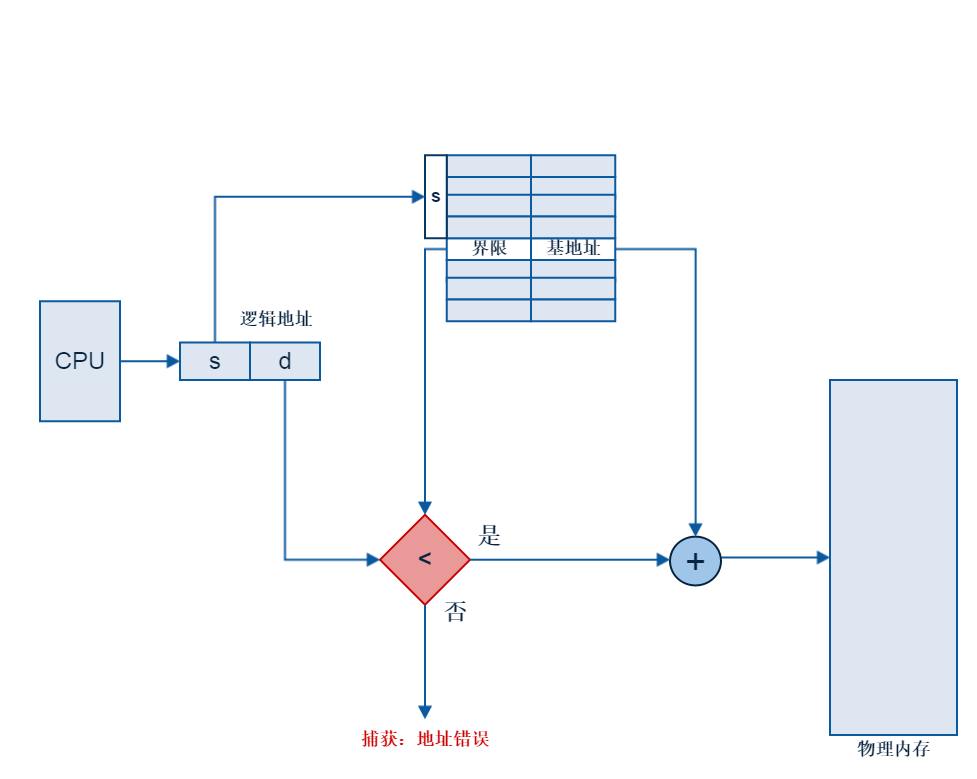
操作系统概念学习笔记 16 内存管理(二) 段页
操作系统概念学习笔记 16
内存管理 (二) 分页(paging)
分页(paging)内存管理方案允许进程的物理地址空间可以使非连续的。分页避免了将不同大小的内存块匹配到交换空间上(前面叙述的内存管理方…

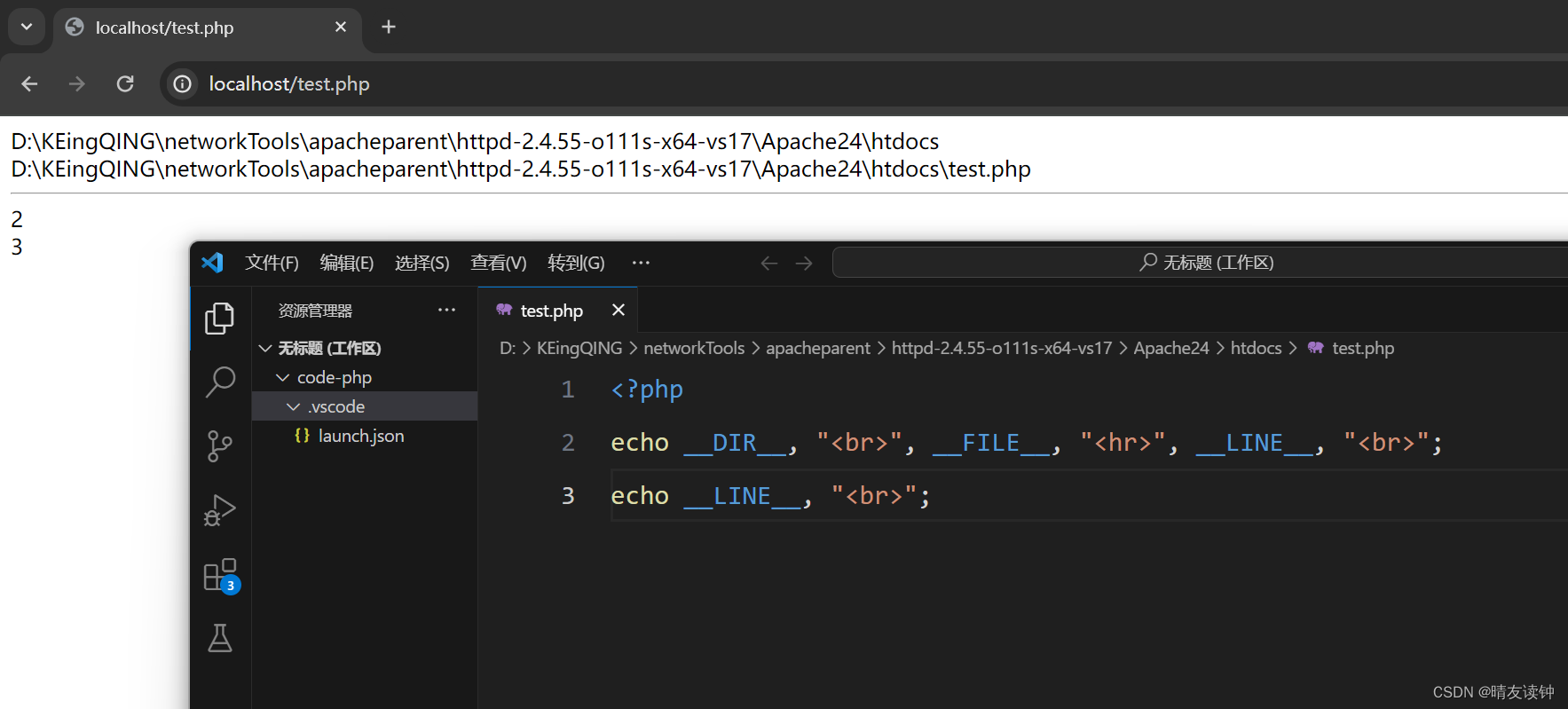
C/C++|物联网开发入门+项目实战|C语言基础|程序运行和内存空间|进制|ascii码|字符转换|printf格式输出-学习笔记(3)
文章目录学习内容提要关于学习教材推荐书籍或资料这个课程我们怎么学课程特色C语言的重要性?从和编程相关的计算机基础开始从计算机的组成谈谈程序的运行代码是怎么变成程序的不同的进制,不同的世界程序和内存空间模型打印地址示例Tips: bit和byte字符编码基础---谈…

php基础学习之作用域和静态变量
作用域 变量(常量)能够被访问的区域,变量可以在常规代码中定义,也可以在函数内部定义 变量的作用域 在 PHP 中作用域严格来说分为两种,但是 PHP内部还定义一些在严格意义之外的一种,所以总共算三种—— 局部…
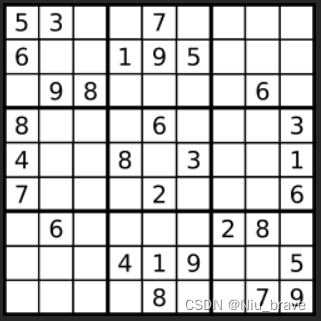
递归算法学习——有效的数独,解数独
一,有效的数独
1.题意 请你判断一个 9 x 9 的数独是否有效。只需要 根据以下规则 ,验证已经填入的数字是否有效即可。 数字 1-9 在每一行只能出现一次。数字 1-9 在每一列只能出现一次。数字 1-9 在每一个以粗实线分隔的 3x3 宫内只能出现一次。&#x…
深度学习预备知识1——数据操作
所有机器学习方法都涉及从数据中提取信息,因此需要一些关于数据的实用技能,包括存储、操作和预处理数据。
机器学习通常需要处理大型数据集。线性代数和矩阵是计算大量数据的有力工具,需要一些矩阵运算相关的线性代数知识。
深度学习是关于…

贪心算法学习——加油站
目录 一,题目
二,题目接口 三,解题思路及其代码 一,题目 在一条环路上有 n 个加油站,其中第 i 个加油站有汽油 gas[i] 升。 你有一辆油箱容量无限的的汽车,从第 i 个加油站开往第 i1 个加油站需要消耗汽油…
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-1+2课程介绍+电路系统建模、基尔霍夫定律](https://img-blog.csdnimg.cn/direct/8cefa772c05f4582b4f2aad33bb4d679.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-1+2课程介绍+电路系统建模、基尔霍夫定律
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-12课程介绍电路系统建模、基尔霍夫定律 1. 课程介绍2. 电路系统建模、基尔霍夫定律 1. 课程介绍 2. 电路系统建模、基尔霍夫定律
基本元件: 电量 库伦&…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-6 线性控制器设计Linear Controller Design](https://img-blog.csdnimg.cn/direct/aa4127cd77cd4c14a64ac0c899edbef3.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-6 线性控制器设计Linear Controller Design
本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-6 线性控制器设计Linear Controller Design
C++学习笔记--函数重载(1)
文章目录 序言一、洞悉函数重载决议1.1、重载决议的基本流程1.2、Name Lookup1.2.1、Qualified Name Lookup1.2.1.1、Class Member Lookup1.2.1.2、Namespace Member Lookup 1.2.2、Unqualified Name Lookup1.2.2.1、Usual Unqualified Lookup1.2.2.2、Argument Dependant Look…

哈希表的实现(1)----除留余数法实现
一,哈希表的介绍 哈希表是一种通过哈希思想实现的一种数据结构。哈希表这种数据结构的特点便是可以通过一个值快速的定位这个值所在的位置实现插入,删除,查找。在这篇博客里面,我们便来实现一个通过除留余数法实现的一个哈希表。 …
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-4系统的可控性Controllability(LTI)线性时不变](https://img-blog.csdnimg.cn/direct/5187dff88dc546f3971178500f623852.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-4系统的可控性Controllability(LTI)线性时不变
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-4系统的可控性Controllability-LTI线性时不变
【趣味JavaScript】一文让你读懂JavaScript原型对象与原型链的继承,探秘属性的查找机制! 《重置版》
🚀 个人主页 极客小俊 ✍🏻 作者简介:web开发者、设计师、技术分享博主 🐋 希望大家多多支持一下, 我们一起学习和进步!😄 🏅 如果文章对你有帮助的话,欢迎评论 💬点赞&a…
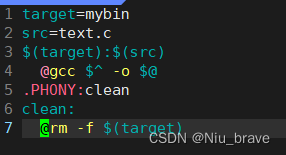
Linux自动化构建项目工具——Makefile/makefile
目录 一,背景知识
二,makefile/Makefile的编写
1.创建makefile/Makefile文件 2.在Makefile文件里写编译代码
3.伪目标——.PHONY
1.伪目标的特点 2.怎样实现总是被执行
4.Makefile/makefile文件的不同编写风格
1.背景知识
2.改写 一,背…
2022全国职业技能大赛-网络安全赛题解析总结⑥(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全 (40分)模块C CTF夺旗-攻击(本模块20分)模块D CTF夺旗-防御(本模块20分)有什么不懂得可以联系博主!交流群:603813289模…
2022全国职业技能大赛-网络安全赛题解析总结⑤(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全(40分)模块C CTF夺旗-攻击(20分)模块D CTF夺旗-防御(20分)有什么不懂得可以联系博主!模块A 基础设施设置与安全加固(20…
C1认证学习笔记(第二章)
C1认证(二)——web基础:语义化标签:任务目标:任务背景:常见的语义化标签:任务练习:表单标签:任务目标:任务背景:form标签:input 元素:…
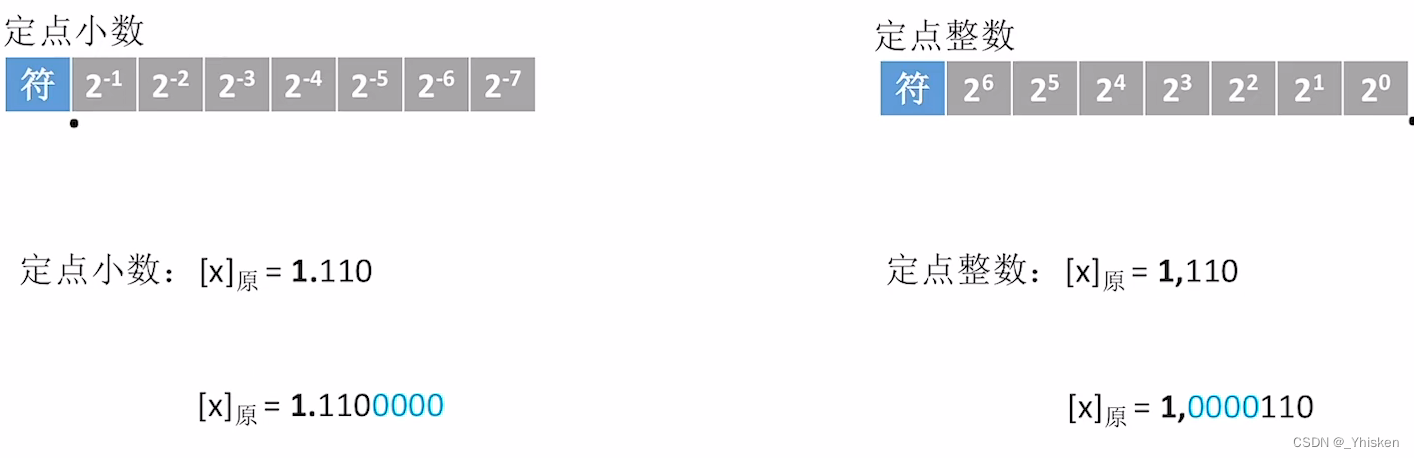
【计算机组成体系结构】移码 | 定点小数的表示和运算
一、移码
上篇我们提到了原码,反码和补码的表示形式和如何转换。这篇我们会提到一个新的概念—移码。移码也很简单,其实就是在补码的基础上把符号取反即可。
值得注意的是,移码只能表示整数。而原码,反码和补码既可以表示整数又…
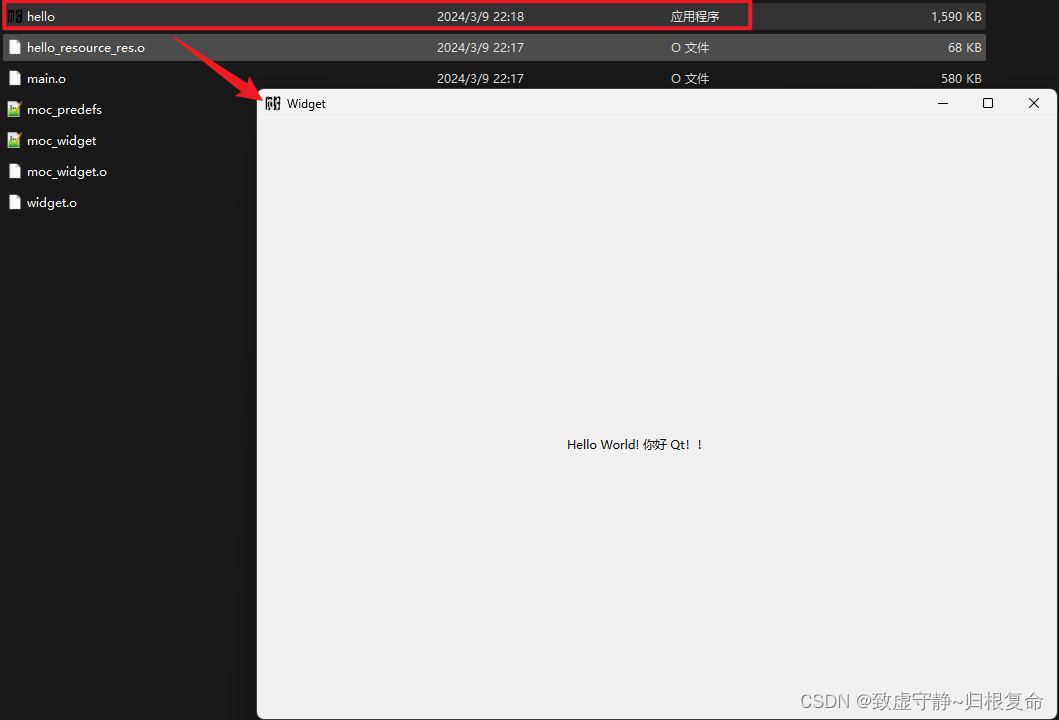
【Qt学习笔记】(二)--第一个程序“Hello World”(学习Qt中程序的运行、发布、编译过程)
声明:本人水平有限,博客可能存在部分错误的地方,请广大读者谅解并向本人反馈错误。 因为我个人对Qt也是有一些需求,所以开设本专栏进行学习,希望大家可以一起学习,共同进步。 这篇博客将从一个 He…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-9PID控制器](https://img-blog.csdnimg.cn/direct/73af05c8c6a94c329e47bfa688ce9ffe.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-9PID控制器
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-9PID控制器) P —— Proportional I —— Integral D —— Derivative
当前误差/过去误差/误差的变化趋势 K p ⋅ e K_{\mathrm{p}}\cdot e Kp⋅e:比…
![[自学记录06|*百人计划]Gamma矫正与线性工作流](https://img-blog.csdnimg.cn/img_convert/fb9053fca186cfaba119a681ab098e7a.jpeg)
[自学记录06|*百人计划]Gamma矫正与线性工作流
一、前言
Gamma矫正其实也属于我前面落下的一块内容,打算把它补上,其它的没补是因为我之前写的GAMES101笔记里已经涵盖了,而Gamma矫正在101里面确实没提到,于是打算把它补上,这块内容并不难,但是想通透的理…

2023爬虫学习笔记 -- 某狗网站爬取数据
一、爬取某狗网站的首页1、导入需要的库文件import requests2、指定我们要访问的网址网页"https://www.sogou.com"3、获取服务器的返回的所有信息响应requests.get(网页)4、通过text属性,从返回信息中读取字符串内容响应内容响应.text5、查看读取到的内容…
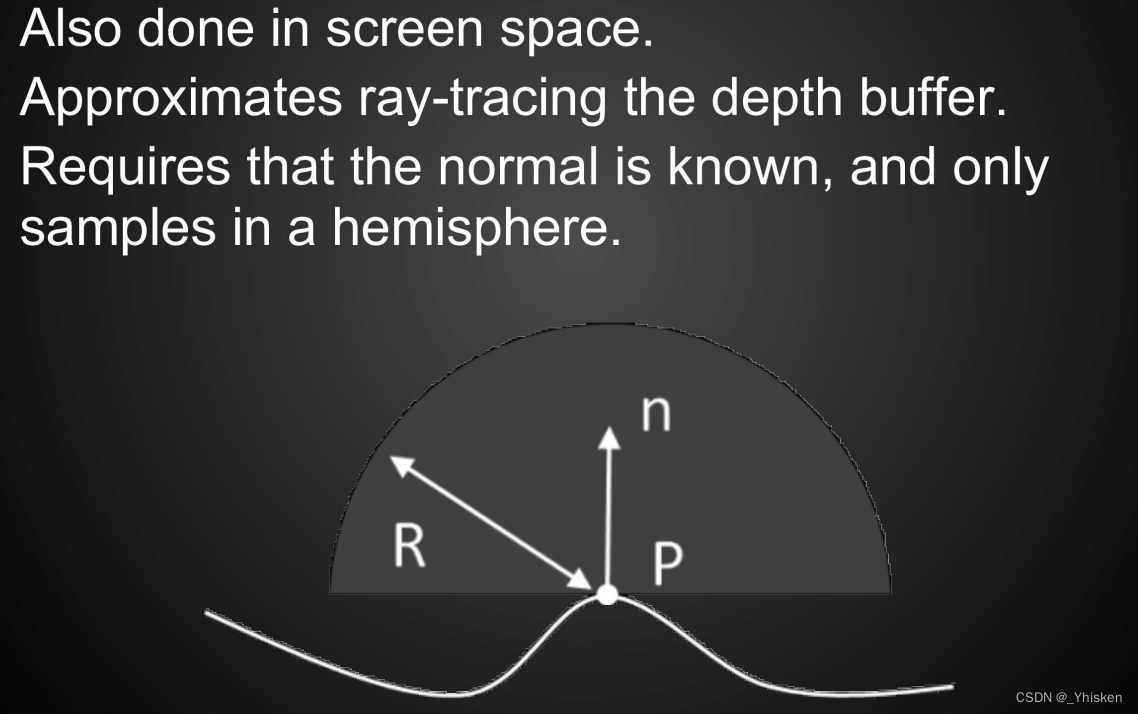
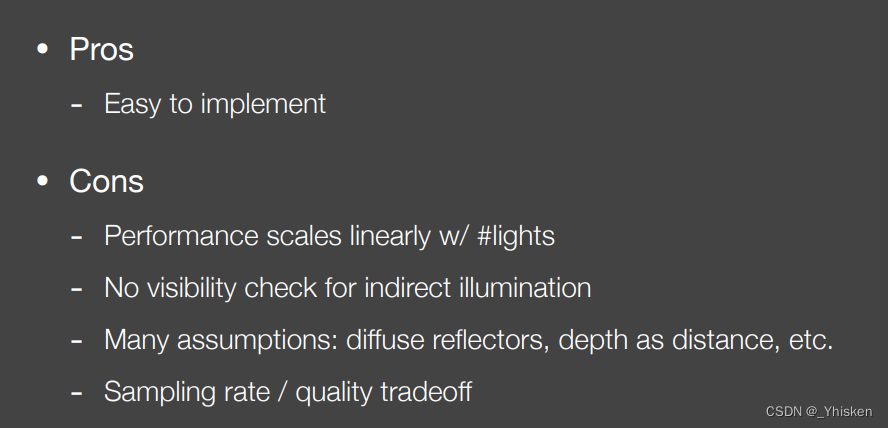
【GAMES202】Real-Time Global Illumination(screen space)1—实时全局光照(屏幕空间)1
一、Real-Time Global Illumination(in 3D cont.)
上篇只介绍了RSM,这里我们还会简要介绍另外两种在3D空间中做全局光照的方法,分别是LPV和VXGI。
1.Light Propagation Volumes (LPV) 首先我们知道Radiance在传播过程中是不会被改变的,这点…
![[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics](https://img-blog.csdnimg.cn/direct/1677268e1f9f4a919827801b77b5c093.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch08 Rigid Body Dynamics
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch08 Rigid Body Dynamics 1. Spatial Vecocity1.1 Spatial vs. Conventional Accel1.2 Plueker Coordinate System and…

Linux shell编程学习笔记26:stty(set tty)
之前我们探讨了Linux中的tty,tty命令的主要功能是显示当前使用的终端名称。
如果我们想进一步对tty进行设置,就要用到stty。
stty的功能:显示和修改终端特性(Print or change terminal characteristics)。
1 stty -…
【Python Threading学习笔记】1、什么是多线程?
多线程类似于同时执行多个不同程序,比如一个很大的数据,直接运行的话可能需要10秒钟才能运行完。
但如果使用Threading或者说使用多线程,我们把数据分成5段,每一段数据都放到一个单独的线程里面运算,所有线程同时开始…
Linux shell编程学习笔记27:tputs
除了stty命令,我们还可以使用tput命令来更改终端的参数和功能。
1 tput 命令的功能
tput 命令的主要功能有:移动更改光标、更改文本显示属性(如颜色、下划线、粗体),清除屏幕特定区域等。
2 tput 命令格式 tput [选…
Cpp学习——list的模拟实现
目录 一,实现list所需要包含的三个类
二,三个类的实现
1.list_node
2.list类 3.iterator_list类
三,功能实现
1.list类里的push_back() 2.iterator类里的运算符重载
3,list类里面的功能函数
1.insert(ÿ…
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-17 串讲
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-17 串讲
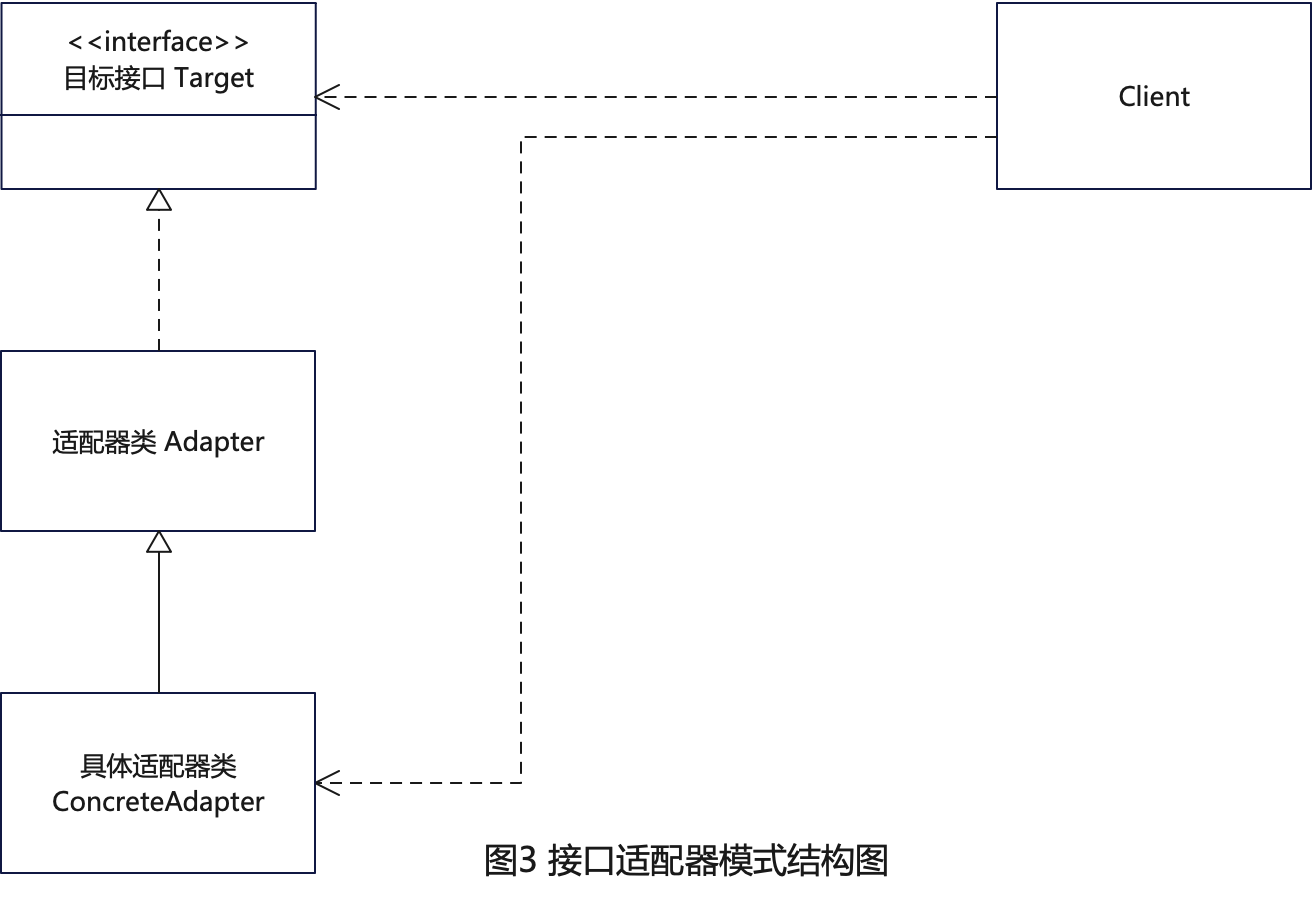
探索设计模式的魅力:深入了解适配器模式-优雅地解决接口不匹配问题
设计模式专栏:http://t.csdnimg.cn/nolNS 目录
一、引言
1. 概述
2. 为什么需要适配器模式
3. 本文的目的和结构
二、简价
1. 适配器模式的定义和特点 定义 特点
2. 适配器模式的作用和适用场景 作用 适用场景
3. 适配器模式与其他设计模式的比较
三、适配…

【模拟集成电路】反馈系统——基础到进阶(一)
【模拟集成电路】反馈系统——基础到进阶 前言1 概述2 反馈电路特性2.1增益灵敏度降低2.2 终端阻抗变化2.3 带宽拓展2.4 非线性减小 3 放大器分类4 反馈检测和返回机制4.1 按照检测物理量分类4.2 按照检测拓扑连接分类 5 反馈结构分析6 二端口方法7 波特方法6 麦德布鲁克方法 前…

Linux shell编程学习笔记13:文件测试运算
Linux Shell 脚本编程和其他编程语言一样,支持算数、关系、布尔、逻辑、字符串、文件测试等多种运算。前面几节我们依次研究了 Linux shell编程 中的 字符串运算、算术运算、关系运算、布尔运算 和 逻辑运算,今天我们来研究 Linux shell编程中的文件测…
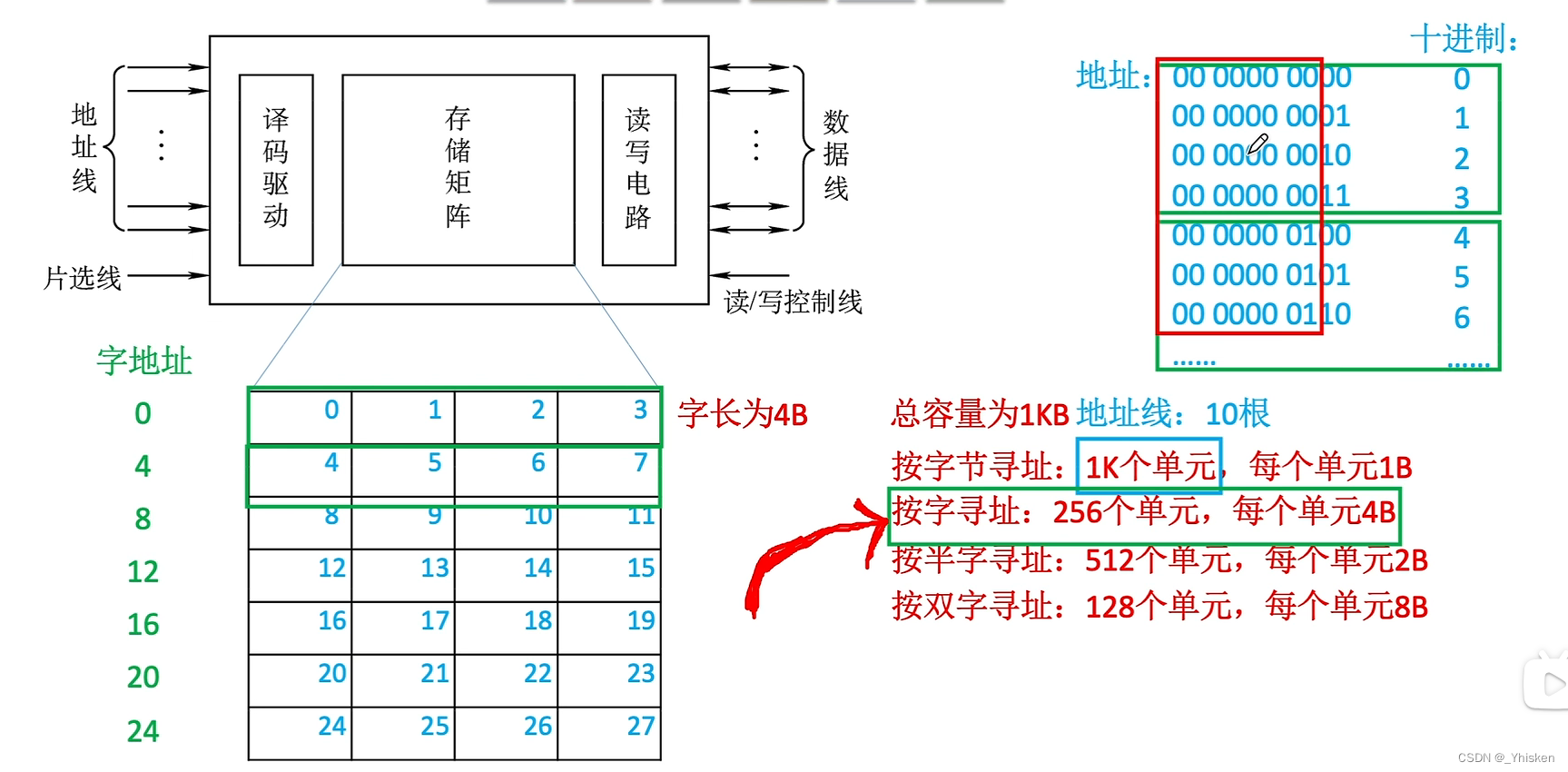
【计算机组成体系结构】主存储器的基本组成
一、半导体元器件存储二进制0/1的原理 一个存储器逻辑上分为MAR,MDR和存储体,这三块在时序逻辑电路的控制下相互配合工作。
而存储体有多个存储单元构成,每个存储单元又由每个存储元构成。一个存储元可以存放一位的二进制的0/1。 一个存储元…
Linux shell编程学习笔记7:只读变量
在编程过程中,我们经常会使用到一些常量,也就是值不需要改变的变量,在许多编程语言提供了常量的定义方式,比如c/c的define MAXNUM 99999 或 const int a 7,javasccipt的const a7, 等等。
跟以上这些方法…

【数据挖掘与分析】python网络爬虫学习及实践记录 | part03-数据解析【1-4 lxml和xpath的结合-理论部分】
六月底就开始停更新博文的原因是“期末周疯狂忙专利”,暑假开始,今天刚好七月半,更完第二部分对urllib及request使用部分的博文,就开启了第三部分数据解析的新内容学习。第三部分主要是数据解析的内容,也就是建立在爬取…
侯捷 C++ STL标准库和泛型编程 —— 9 STL周围
最后一篇,完结辽!😋 9 STL周围
9.1 万用Hash Function
Hash Function的常规写法:其中 hash_val 就是万用Hash Function
class CustumerHash
{
public:size_t operator()(const Customer& c) const{ return hash_val(c.fna…
对openpose的test_pose.py的代码解读
heat_avgnp.zero((height,widh,19)) 声明height个widh*19个二维矩阵 关于对np.newaxis的理解
作用:在指定位置增加一个一维,也就是说np.newaxis所在的位置就要新list增加的维度
举例:引用https://www.jianshu.com/p/78e1e281f698
x1 np.a…
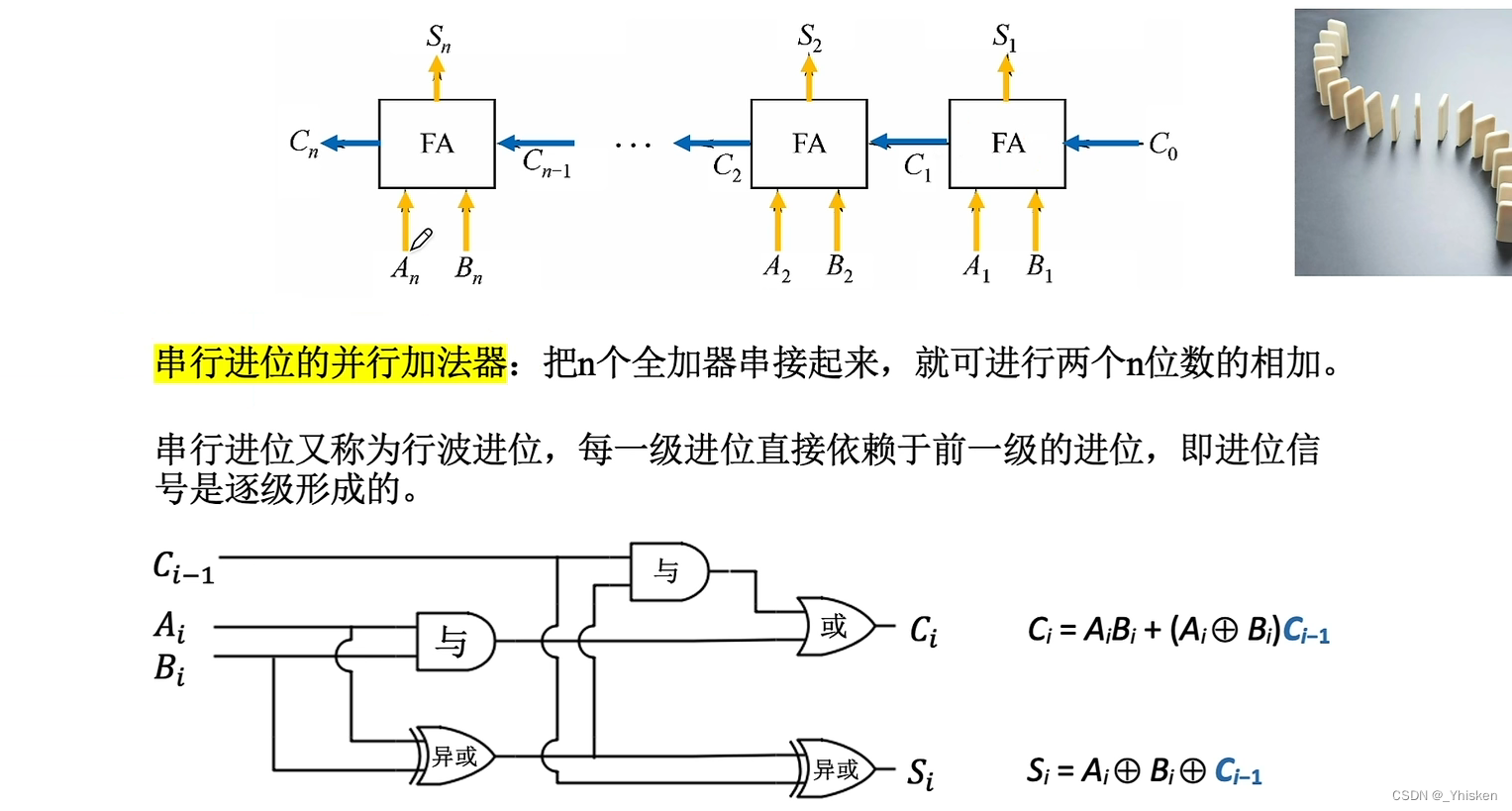
【计算机组成体系结构】电路基本原理与加法器设计
一、算术逻辑单元—ALU 1.基本的逻辑运算(1bit的运算) 基本逻辑运算分为,与、或、非。大家应该很熟悉了,与:全1为1,否则为0。或:全0为0,否则为1。非:取反。三个基本的逻…
C++学习—单例模式
目录
编辑
一,单例模式介绍
二,单例模式下的两种模式 1,饿汉模式
2,懒汉模式 一,单例模式介绍 单例:在全局只有一份实例。 单例模式是编程的经典模式之一。 二,单例模式下的两种模式 1&am…
Linux shell编程学习笔记9:字符串运算 和 if语句
Linux Shell 脚本编程和其他编程语言一样,支持算数、关系、布尔、字符串、文件测试等多种运算,同样也需要进行根据条件进行流程控制,提供了if、for、while、until等语句。
上期学习笔记中我们研究了字符串数据的使用,今天我们研…

LSTM 长短期记忆递归神经网络
1、神经网络简介
1.1 神经网络起源
人工神经网络(Aritificial Neural Networks, ANN)是一种仿生的网络结构,起源于对人类大脑的研究。人工神经网络(Aritificial Neural Networks)也常被简称为神经网络(Ne…
【计算机组成体系结构】存储系统基本概念
一、存储器的层次化结构 CPU无法直接与辅存传输数据,因为CPU的处理速度大于辅存的读写速度,如果直接交互会拖累CPU的速度。所以需要先把辅存中的数据写入主存再与CPU进行数据传输。
Cache,高速缓存在主存和CPU之间。存在Cache的原因是主存的…
![[足式机器人]Part2 Dr. CAN学习笔记 - Ch03 傅里叶级数与变换](https://img-blog.csdnimg.cn/direct/9675ebcd1f6d4f81820824dfea2fb2aa.png)
[足式机器人]Part2 Dr. CAN学习笔记 - Ch03 傅里叶级数与变换
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Ch03 傅里叶级数与变换 1. 三角函数的正交性2. 周期为 2 π 2\pi 2π的函数展开为傅里叶级数3. 周期为 2 L 2L 2L的函数展开4. 傅里叶级数的复数形式5. 从傅里叶级数推导傅里叶变换FT6. 总结 1. …
Linux shell编程学习笔记32:declare 命令
0 前言
在
Linux shell编程学习笔记16:bash中的关联数组https://blog.csdn.net/Purpleendurer/article/details/134053506?spm1001.2014.3001.5501
中,我们在定义关联数组时使用了declare命令。
其实,declare命令的功能不只是定义定义关…
MYSQL常用函数详解
今天查缺陷发现同事写的一个MYSQL的SQL中用到函数JSON_CONTAINS,我当时第一反应是这个函数是Mysql8新加的么?原来小丑尽是我自己。 有必要巩固一下Mysql函数知识,并记录一下。(如果对您也有用,麻烦您动动发财的手点个赞…

《操作系统真象还原》 第 01 章 部署工作环境 学习笔记
0. 内容说明
本内容依据《操作系统真象还原》进行学习,在学习过程中,由于新版本和旧版本bochs存在参数差异,故此会出现一些调试错误。也记录对应的解决方案。
1. 需要的编译器
对于现代OS来说,主要使用 C语言 和 汇编语言 两种…
Delaunay三角剖分学习笔记
文章目录 Delaunay三角剖分学习笔记1 Voronoi \text{Voronoi} Voronoi图1.1 定义与性质 2 三角剖分2.1 定义与性质2.2 质量(quality)评定标准 3 Delaunay三角剖分3.1 定义3.2 准则与性质 4 Delaunay三角剖分算法4.1 Bowyer-Watson算法4.1.1 算法步骤:4.1.2 算法伪代…
Ink脚本语言学习笔记(小结)
在之前的四个部分中已经基本了解了Ink的语法和功能,这里就个人的理解作一下小结
一、基础内容
文本——分为默认/注释/提醒/标签文本,如果没有经过特殊标记,所有默认文本会显示在输出内容中选项——分为用*号标记的一次性选项和用标记的可重…
高项备考葵花宝典-项目进度管理输入、输出、工具和技术(中,很详细考试必过)
项目进度管理的目标是使项目按时完成。有效的进度管理是项目管理成功的关键之一,进度问题在项目生命周期内引起的冲突最多。 小型项目中,定义活动、排列活动顺序、估算活动持续时间及制定进度模型形成进度计划等过程的联系非常密切,可以视为一…
ajax基础学习笔记整理
一、ajax原理及功能
ajax:Asynchronous JavaScript and XML 翻译为中文异步的JavaScript和XML(用JavaScript异步形式去操作XML)
ajax的特点:无刷新页面就可以完成数据交互。
ajax的优点:节省用户操作时间,…
LLM大语言模型(典型ChatGPT)入门指南
文章目录 一、基础概念学习篇1.1 langchain视频学习笔记1.2 Finetune LLM视频学习笔记 二、实践篇2.1 预先下载模型:2.2 LangChain2.3 Colab demo2.3 text-generation-webui 三、国内项目实践langchain-chatchat 一、基础概念学习篇
1.1 langchain视频学习笔记 lan…
smartGit的操作、文字上边框对齐、vue中弹窗组件、全局组件的引入
1. smartGit的基础操作——切换分支提交代码
(1)在自己的branch上开发功能,然后将代码commit到本地仓库
(2)切换到master上,pull最新的master到本地,确保muster是最新的
(3&#…

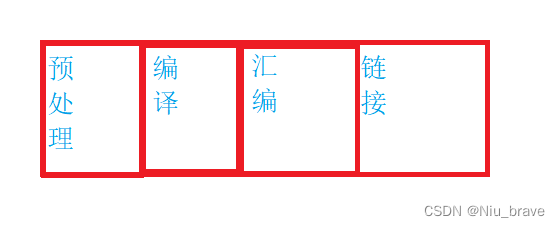
Linux工具——gcc
目录 一,gcc简介
二,C语言源文件的编译过程
1.预处理
2.编译
3.汇编 4.链接
5.动静态库 一,gcc简介 相信有不少的小白和我一样在学习Linux之前只听说过visual studio。其实这个gcc这个编译器实现的功能便是和visual studio一样的功能&…

Linux下的第一个小程序——进度条
目录
编辑
一,进度条的第一个版本
1.准备工作
2.写Makefile文件 3.开始构建进度条
1. process.h文件
2. process.c文件
3.main.c文件
二,进度条的第二个版本
1.为什么还要写第二个版本?
2.如何升级?
3.升级代码
1.搭…
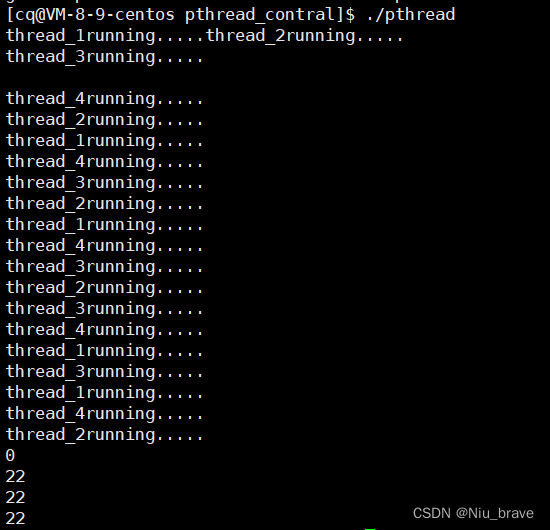
Linux学习——线程的控制
目录
编辑
一,线程的创建
二,线程的退出
1,在子线程内return 2,使用pthread_exit(void*)
三,线程等待
四,线程获取自己的id值
五,线程取消
六,线程分离 一,线程的创建 在对…

Linux shell编程学习笔记6:查看和设置变量的常用命令
上节我们介绍了变量的变量命名规则、变量类型、使用变量时要注意的事项,今天我们学习一下查看和设置变量的一些常用命令,包括变量的提升,有些命令在之前的实例中已经使用过了。
一、 echo :查看变量的值 语法格式:ech…
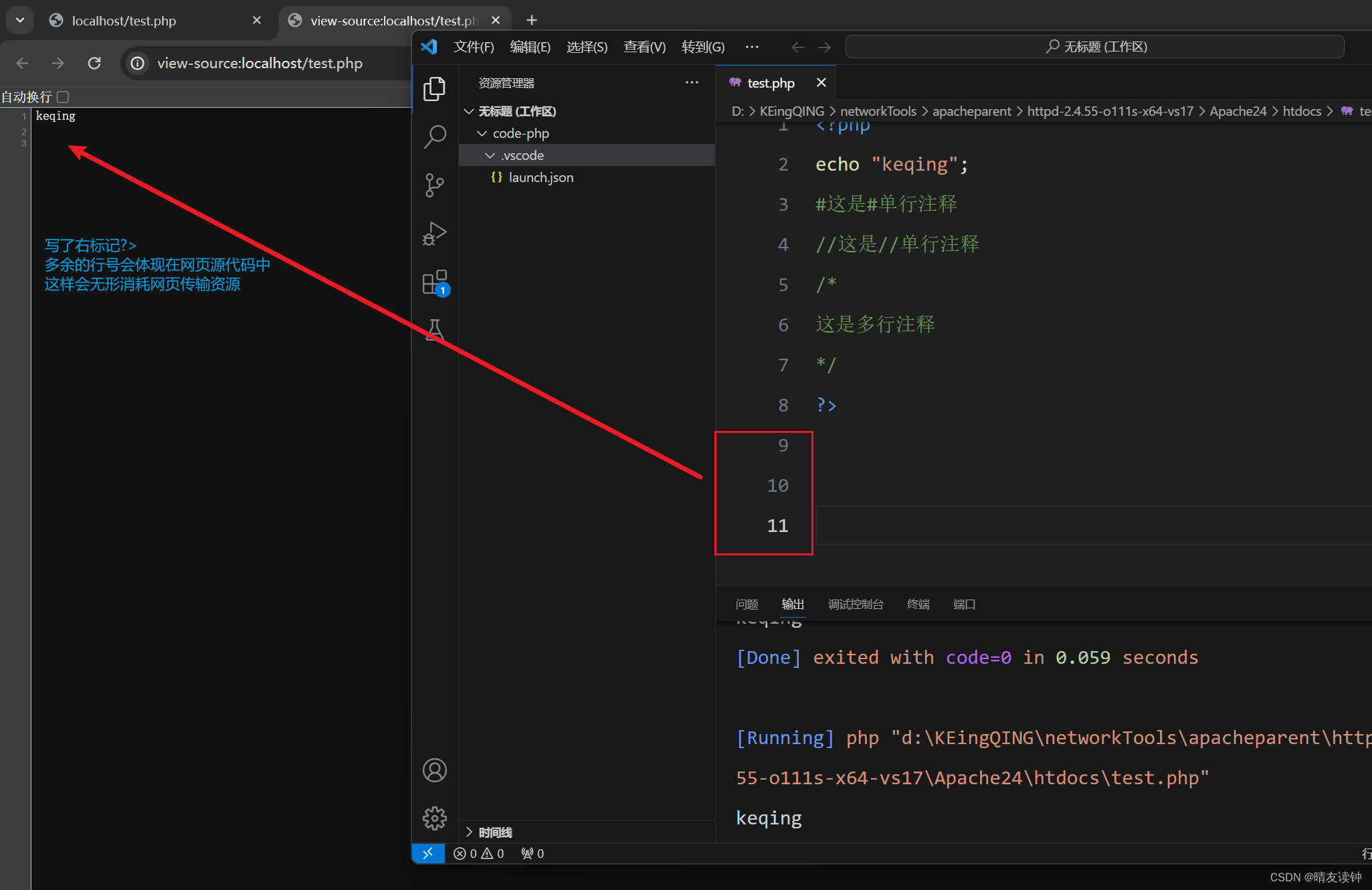
php基础学习之代码框架
一,标记
脚本标记(已弃用):<script language"php"> php代码 </script>
标准标记:<?php php代码 ?> 二,基础输出语句
不是函数,…

Go语言学习Day3:数据类型、运算符与流程控制
名人说:莫愁千里路,自有到来风。 ——钱珝 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 目录 1、数据类型①布尔类型②整型③浮点型④string⑤类型转换 2、运算符①算术运算符②逻辑运算符③关…
【计算机组成体系结构】HW1:指令系统举例教学计算机汇编语言程序设计
一、指令系统举例
计算机指令系统分类:RISC和CISC (RISC执行同样处理功能的程序所占用时间更简短,RISC机器的运行性能可能比CISC机器高2~5倍)
公式:P I x CPI x T (P表示执行一个程序所用时间,I表示该程序中包含的机器指令总条…
网络协议——HTTP协议
目录
编辑
一,HTTP协议基本认识
二,认识URL
三,http协议的格式 1,发送格式
2,回应格式
四,服务端代码
五,http报文细节
1,Post与Get方法
2,Content_lenth 3&…
Cpp学习——vector模拟实现
vector简介 在模拟实现vector之前,首先就得知道vector是个啥?vector是个啥呢?vector是一个stl里面的容器,并且是一个模板容器。它就像是一个顺序表模板。还记得顺序表吧?之前我实现的顺序表只能弄整形的数据࿰…
网络协议学习——IP协议
目录
编辑
一,IP协议
二,协议字段
三,IP层传输数据的问题
1,如何将报头和有效载荷分离
2,向上协议选择
3,局域网
四,IP问题
1,IP的组成
2,IP的划分
3&#…
Linux shell编程学习笔记12:布尔运算和逻辑运算
Linux Shell 脚本编程和其他编程语言一样,支持算数、关系、布尔、逻辑、字符串、文件测试等多种运算。前面几节我们陆续研究了 Linux shell编程 中的 字符串运算、算术运算和关系运算,今天我们来研究 Linux shell编程中的的布尔运算、逻辑运算。
一、…
MYSQL数字函数详解和实战(数字函数大全,内含示例)
MySQL提供了许多数字函数,用于对数字进行各种计算和处理。以下是一些常用的MySQL数字函数。 内容有点多,建议收藏以备后续用到查阅参考。 目录
一、SIGN 取数字的符号
二、ABS 取绝对值
三、COS 取余弦值
四、ACOS 取反余弦值
五、SIN 取正弦值
六…

基于C/C++的UG二次开发流程
文章目录 基于C/C的UG二次开发流程1 环境搭建1.1 新建工程1.2 项目属性设置1.3 添加入口函数并生成dll文件1.4 执行程序1.5 ufsta入口1.5.1 创建程序部署目录结构1.5.2 创建菜单文件1.5.3 设置系统环境变量1.5.4 制作对话框1.5.5 创建代码1.5.6 部署和执行 基于C/C的UG二次开发…
![[足式机器人]Part2 Dr. CAN学习笔记-Ch00 - 数学知识基础](https://img-blog.csdnimg.cn/direct/cc78b19f146c4185a1082da5319042ac.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Ch00 - 数学知识基础
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Ch00 - 数学知识基础 1. Ch0-1矩阵的导数运算1.1标量向量方程对向量求导,分母布局,分子布局1.1.1 标量方程对向量的导数1.1.2 向量方程对向量的导数 1.2 案例分析…
递归算法学习——二叉树的伪回文路径
1,题目 给你一棵二叉树,每个节点的值为 1 到 9 。我们称二叉树中的一条路径是 「伪回文」的,当它满足:路径经过的所有节点值的排列中,存在一个回文序列。 请你返回从根到叶子节点的所有路径中 伪回文 路径的数目。 示例…
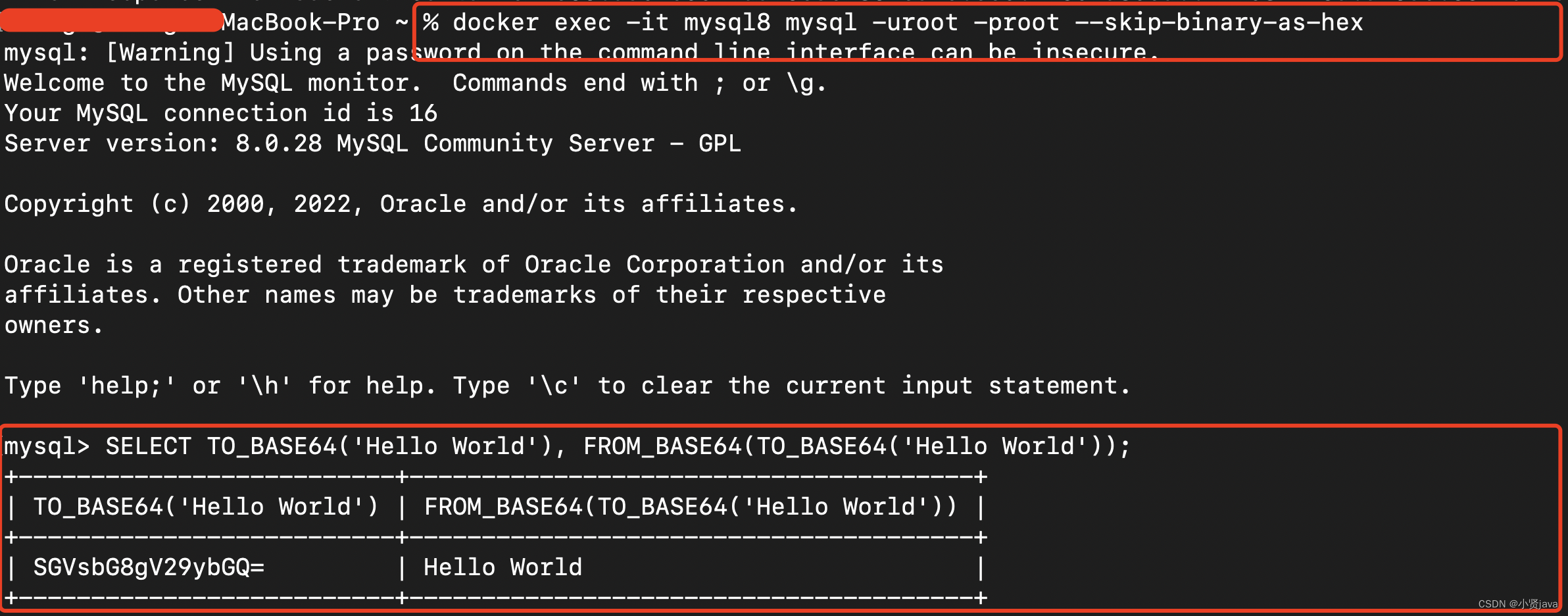
MYSQL加密和压缩函数详解和实战(含示例)
MySQL提供了多种加密和压缩方式,可以帮助保护数据库中的敏感数据。以下是一些常见的MySQL加密和压缩方法参考: 建议收藏以备后续用到查阅参考。 目录
一、AES_ENCRYPT AES加密
二、AES_DECRYPT AES解密
三、COMPRESS 压缩字符串
四、UNCOMPRESS 解压…
![[足式机器人]Part4 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames](https://img-blog.csdnimg.cn/direct/e51d3ce1ff354bd980f96042e7092e47.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch05 Instantaneous Velocity of Moving Frames 1.Instantanenous Velocity of Rotating Frames2.Instantanenous Veloc…
Libevent库学习笔记
Libevent是一个事件触发的网络库,适用于windows、linux、bsd等多种平台,Libevent在底层select、pool、kqueue和epoll等机制基础上,封装出一致的事件接口。可以注册可读、可写、超时等事件,指定回调函数;当事件发生后&a…
![[足式机器人]Part4 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity](https://img-blog.csdnimg.cn/direct/4d03b6ad193f40968f29c1577f121f8b.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch02 Rigid Body Configuration and Velocity 1. Rigid Body Configuration1.1 Special Orthogonal Group1.2 Use of Ro…
[足式机器人]Part4 南科大高等机器人控制课 Ch03 Operator View of Rigid-Body Transformation
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch03 Operator View of Rigid-Body Transformation 1. Rotation Operation via Differential Equation1.1 Skew Symmetr…

机器人中的数值优化(六)—— 线搜索最速下降法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…
![[足式机器人]Part4 南科大高等机器人控制课 Ch09 Dynamics of Open Chains](https://img-blog.csdnimg.cn/direct/541b02f13d9e44f0ae7ad0e69dbfa8fc.png)
[足式机器人]Part4 南科大高等机器人控制课 Ch09 Dynamics of Open Chains
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch09 Dynamics of Open Chains 1. Introduction1.1 From Single Rigid Body to Open Chains1.2 Preview of Open-Chain …
技术类知识汇总(二)
在自己日常学习javaweb的过程中,做的一些笔记和总结,汇总如下:
Springboot项目的静态资源(html,css,js等前端资源)默认存放目录为:classpath:/static classpath:/public classpath:/resources"三层架…
【学术会议】第三届神经计算青年研讨会 学习笔记
第三届神经计算青年研讨会 学习笔记 会议时间:2024-1-6至2024-1-7 会议地点:电子科技大学 会议介绍: 为提升我国神经计算⻘年研究队伍的学术⽔平和国际影响⼒,研讨会主题涵盖:神经系统建模与模拟、脑机接⼝与类脑智能、…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-7 LQR控制器 Linear Quadratic Regulator](https://img-blog.csdnimg.cn/direct/10eaecbbeb514e9995a5ccaee8562098.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-7 LQR控制器 Linear Quadratic Regulator
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-7 LQR控制器 Linear Quadratic Regulator 线性控制器设计-轨迹跟踪(Fellow a Desired Path)
[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05 1. Recursive Algirithm 递归算法2. Data Fusion 数据融合Covarince Matrix协方差矩阵State Space状态空间方程 Observation观测器3. Step by step : Deriatio…
php基础学习之可变函数(web渗透测试关键字绕过rce和回调函数)
可变函数
看可变函数的知识点之前,蒟蒻博主建议你先去看看php的可变变量,会更加方便理解,在本篇博客中的第五块知识点->php基础学习之变量-CSDN博客 描述 当一个变量所保存的值刚好是一个函数的名字(由函数命名规则可知该值必…
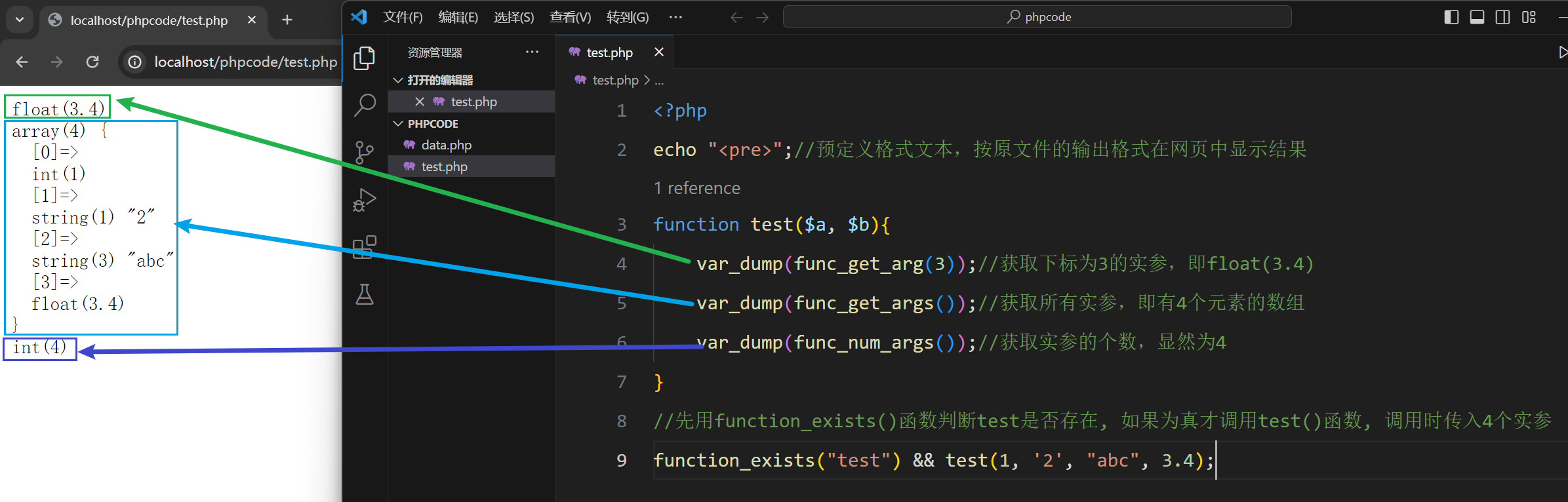
php基础学习之常用系统函数
一,有关输出的语句/函数 echo语句 用于输出一个或多个字符串 print语句 用于输出一个字符串(用句点连接的多个字符串本质是一个字符串),与echo类似,但返回值为1 printf()函数 用于格式化输出字符串,类似于C…
网络协议学习——HTTPS
目录
编辑
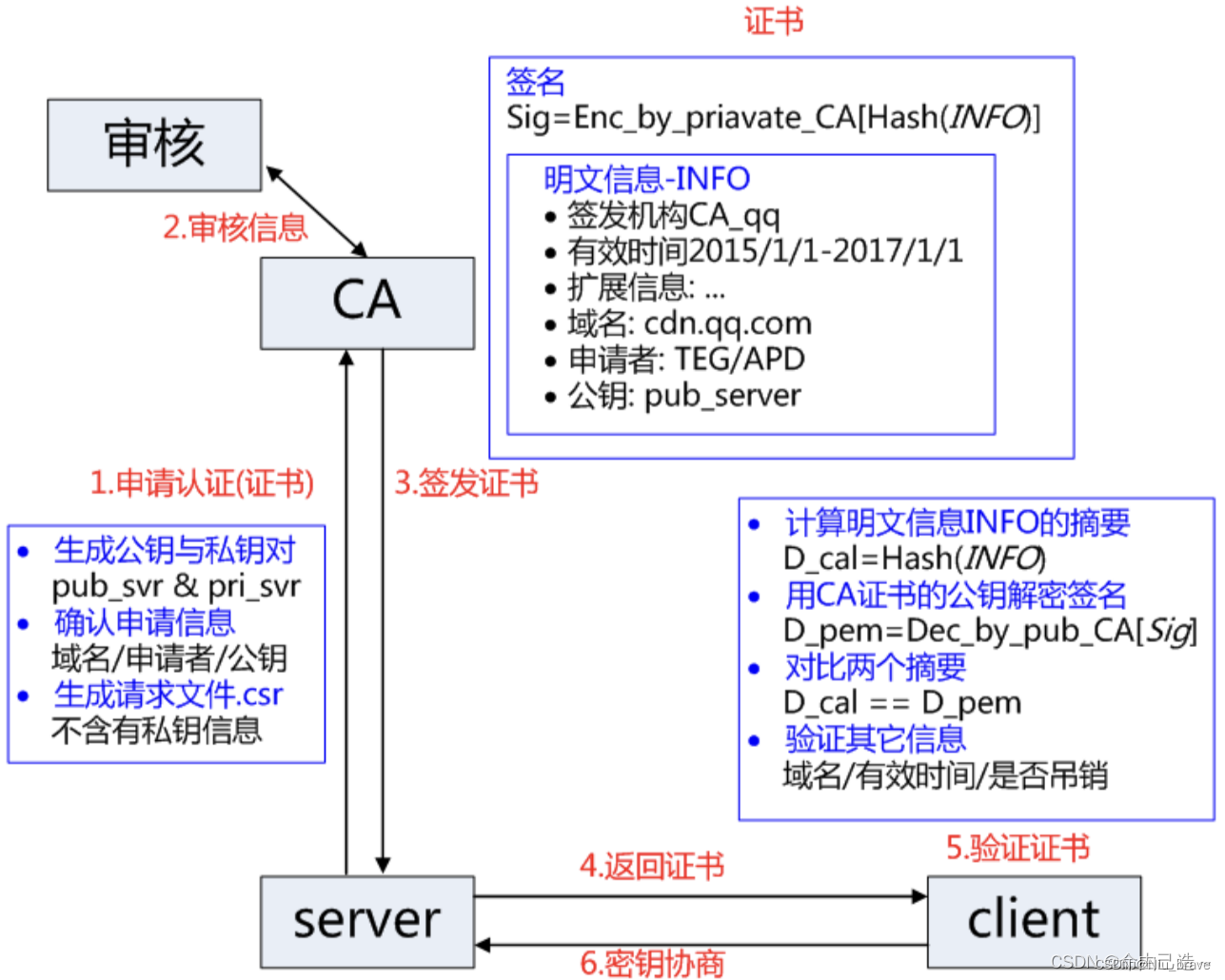
一,认识HTTPS
二,加密方式 1,对称式加密
2,非对称式的加密
3,数据指纹(数据摘要)
4,数据签名
三,HTTPS的工作原理
实现方式 数字证书 一,…

Linux中的软件管家——yum
目录
编辑
一,软件安装的方式 二,对yum的介绍
1.yum的作用
2,yum的库 三,yum下载软件的操作
1.yumlist
2.yuminstall
3.yumremove
四,yum源的转换 一,软件安装的方式 软件安装的方式大概分为三种…
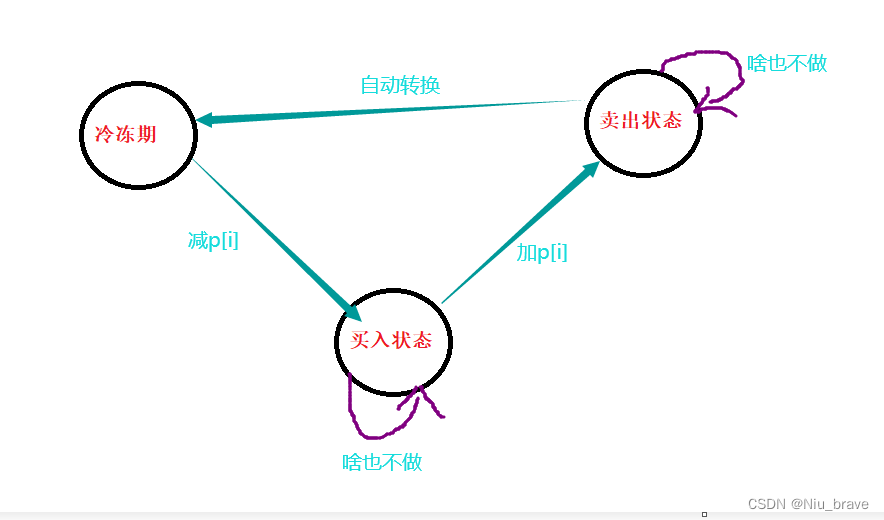
多状态Dp问题——买卖股票的最佳时机含冷冻期
目录
一,题目
二,题目接口
三,解题思路及其代码 一,题目 给定一个整数数组prices,其中第 prices[i] 表示第 i 天的股票价格 。 设计一个算法计算出最大利润。在满足以下约束条件下,你可以尽可能地完成…
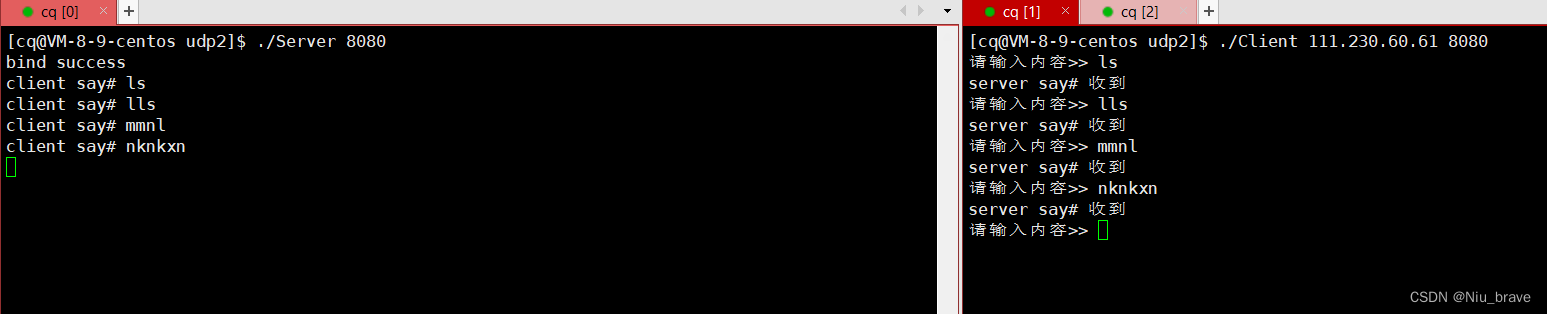
demo版的udp网络通信实现
目录 编辑
一,引言 二,服务端
1,server类
2,构造函数 3,初始化服务函数
初始化函数整体代码:
4,启动函数
三,客户端
四,main函数调用 一,引言
今天…
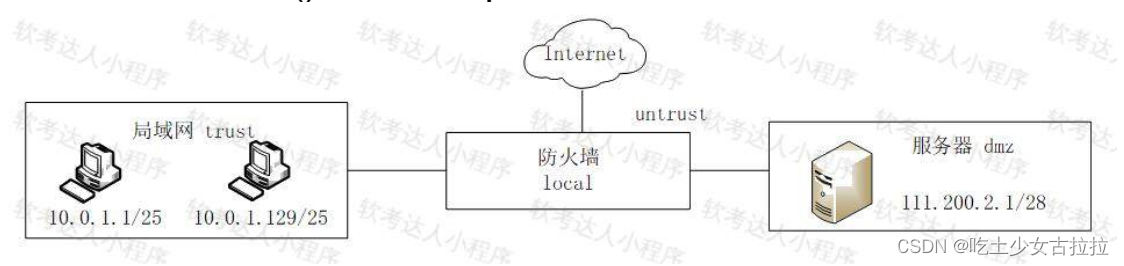
软考中级 --网络工程师真题试卷 2023下半年
在EIGRP协议中,某个路由器收到了两条路径到达目标网络,路径1的带宽为100Mbps,延迟2ms,路径2的带宽为50Mbps,迟为4ms,如果EIGRP使用带宽和延迟的综合度量标准,那么该路由器选择的最佳路径是(D)。…
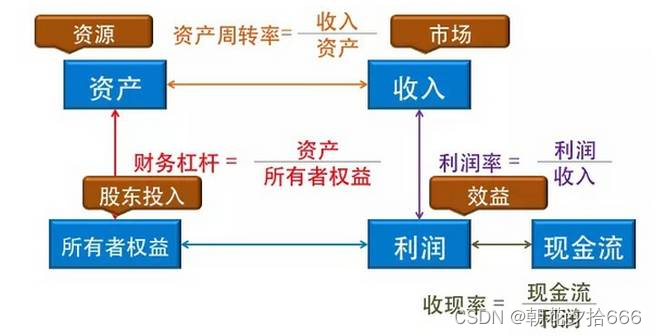
学习笔记:如何分析财务报表
其实财务报表分析最核心的东西,是通过财务报表这个结果,由果推因,找出造成这个结果的原因。 会计是商业的语言
首先第一个问题是——会计是商业的语言,这是会计的根本。
什么叫“语言”,就是可以通过它进行交流。比如…

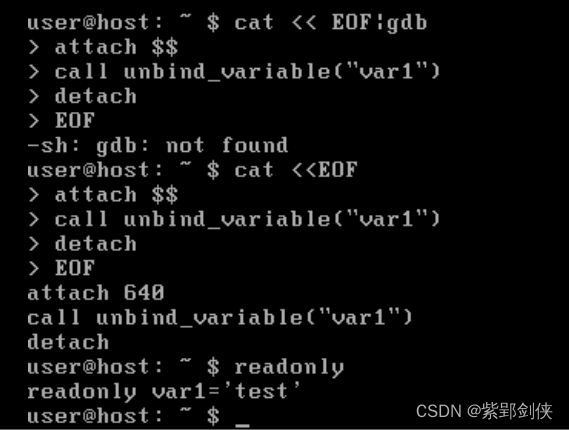
Linux工具——gdb
目录 一,gdb简介
二,gdb的指令
1.查看gdb是否有下载
2.需要明确的知识点 3.调试指令
1.打开调试代码 2.以某行为起点显示代码
3.打断点,查看断点,删除断点,禁用断点,启用断点
4.逐过程,逐…

【数据分析与挖掘】数据分析学习及跟课学习 | csdn_Part 02 数据结构基础
依旧是整理笔记的一天,纸质笔记为了简便很多东西没有完全写上,一些小练习也没跟上,再进行练习的时候好像有点问题。尽量打字熟悉吧,并且对于这方面知识可以以专业角度去深挖,不要仅限于分析的理论层面。另外数据结构基…
ubuntu Linux操作系统使用教程(学习笔记)
本文为《Ubuntu Linux操作系统使用教程》(人民邮电出版社)的个人学习笔记。
第一章——系统介绍
Linux、GNU、GPL的关系,Linux的主要发行版本、Linux系统特性及与Windows的区别,略
第二章——系统部署
系统安装——略…
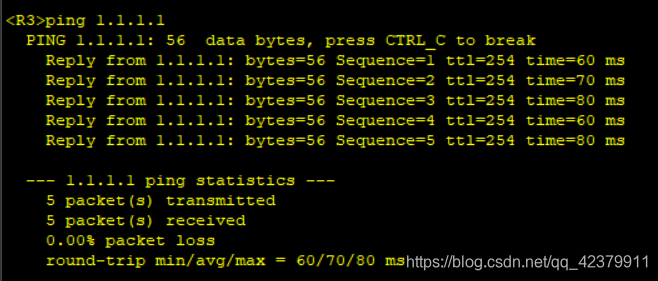
rip详解,华为路由器指令,ripv1,v2通信。
rip详解以及华为指令(包括基础指令)rip(routing informition protocol)简介工作机制基本概念:rip防环机制rip的工作过程rip的三个版本华为路由器配置rip v2认证rip 汇总路由rip缺省路由静默接口(只接受不发…
Go语言基础语法学习笔记[2]
算术运算符: - * / % -- 注意: --这两个运算符不返回值,所以不能作为赋值或输出,例如下面的用法是非法的 var a int 3 fmt.Println(a) //syntax error: unexpected , expectingcomma or ) var b…
java学习笔记--基本数据类型
java数据类型
基本数据类型
一、整型
(1)byte字节型
所占内存:8bit(1字节) 0 0000000 1字节(byte) 8比特(bit) 用第一个bit位置来记录符号,0表示正数&am…
![[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-3Phase Portrait相图,相轨迹](https://img-blog.csdnimg.cn/direct/00e7a77abb284f2a9331b3cfa0a10197.png)
[足式机器人]Part2 Dr. CAN学习笔记-Advanced控制理论 Ch04-3Phase Portrait相图,相轨迹
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Advanced控制理论 Ch04-3Phase Portrait相图,相轨迹 1. 1-D2. 2-D3. General Form4. Summary5. 爱情中的数学-Phase Portrait 相图动态系统分析 1. 1-D 2. 2-D 3. General Form 4. Su…
金三银四-解锁Java并发编程的艺术:掌握多线程、同步和并发控制的精髓
又要快到一年一度的金三银四,开始复习啦~! 每天一点点。。 目录
一、Java中的volatile关键字有什么作用?
二、解释Java中的synchronized关键字及其工作原理。
三、Java中的CAS操作是什么?它如何实现无锁编程&#x…
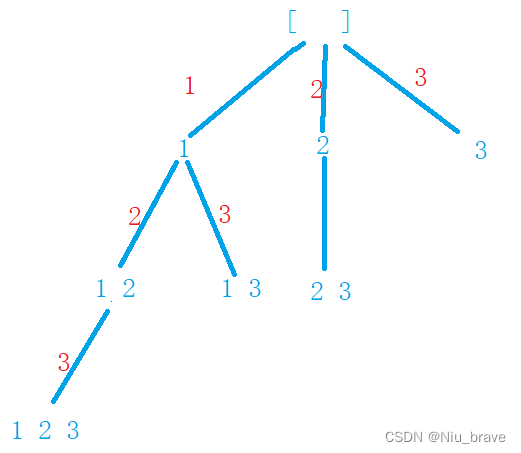
递归算法学习——子集
目录 一,题目解析
二,例子
三,题目接口 四,解题思路以及代码
1.完全深度搜索
2.广度搜索加上深度优先搜索
五,相似题
1.题目
2.题目接口 3.解题代码 一,题目解析 给你一个整数数组 nums ,…

动态规划算法学习——解码方法
一,题目 一条包含字母 A-Z 的消息通过以下映射进行了 编码 : A -> "1"
B -> "2"
...
Z -> "26" 要 解码 已编码的消息,所有数字必须基于上述映射的方法,反向映射回字母(可能有…
![[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-4 拉普拉斯变换(Laplace)传递函数、微分方程](https://img-blog.csdnimg.cn/direct/75539048aed84a8f8f233c199db174c3.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-4 拉普拉斯变换(Laplace)传递函数、微分方程
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-4 拉普拉斯变换(Laplace)传递函数、微分方程 1. Laplace Transform 拉式变换2. 收敛域(ROC)与逆变换(ILT&…
[足式机器人]Part2 Dr. CAN学习笔记-动态系统建模与分析 Ch02-8 Bode Plot伯德图
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-动态系统建模与分析 Ch02-8 Bode Plot伯德图 Bode Plot 手绘技巧与应用
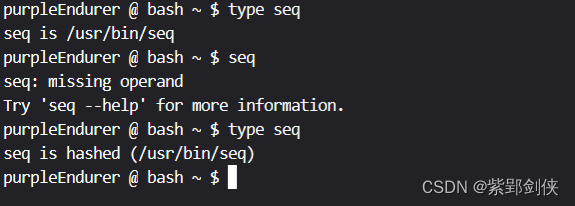
Linux shell编程学习笔记35:seq
0 前言
在使用 for 循环语句时,我们经常使用到序列。比如: for i in 1 2 3 4 5 6 7 8 9 10; do echo "$i * 2 $(expr $i \* 2)"; done 其中的 1 2 3 4 5 6 7 8 9 10;就是一个整数序列 。
为了方便我们使用数字序列,Linux提供了…
Deep Learning(深度学习)学习笔记整理系列之(六)
原文地址为:
Deep Learning(深度学习)学习笔记整理系列之(六)Deep Learning(深度学习)学习笔记整理系列
zouxy09qq.com
http://blog.csdn.net/zouxy09
作者:Zouxy
version 1.0 2…
金三银四-JVM核心知识高频面试题
又要快到一年一度的金三银四,开始复习啦~! 每天一点点。。 目录
一、JVM中的垃圾收集器有哪些,它们的工作原理是什么?
二、JVM中的类加载器有哪些,它们各自的作用是什么?
三、JVM中垃圾回收的…

英之剑法——第一境(通达人与物之境)
🌟博主:命运之光 ☀️专栏:英之剑法🗡 ❤️🔥专栏:英之试炼🔥 ☀️博主的其他文章:点击进入博主的主页 🐳 开篇想说的话:开学就大三了,命运之光…
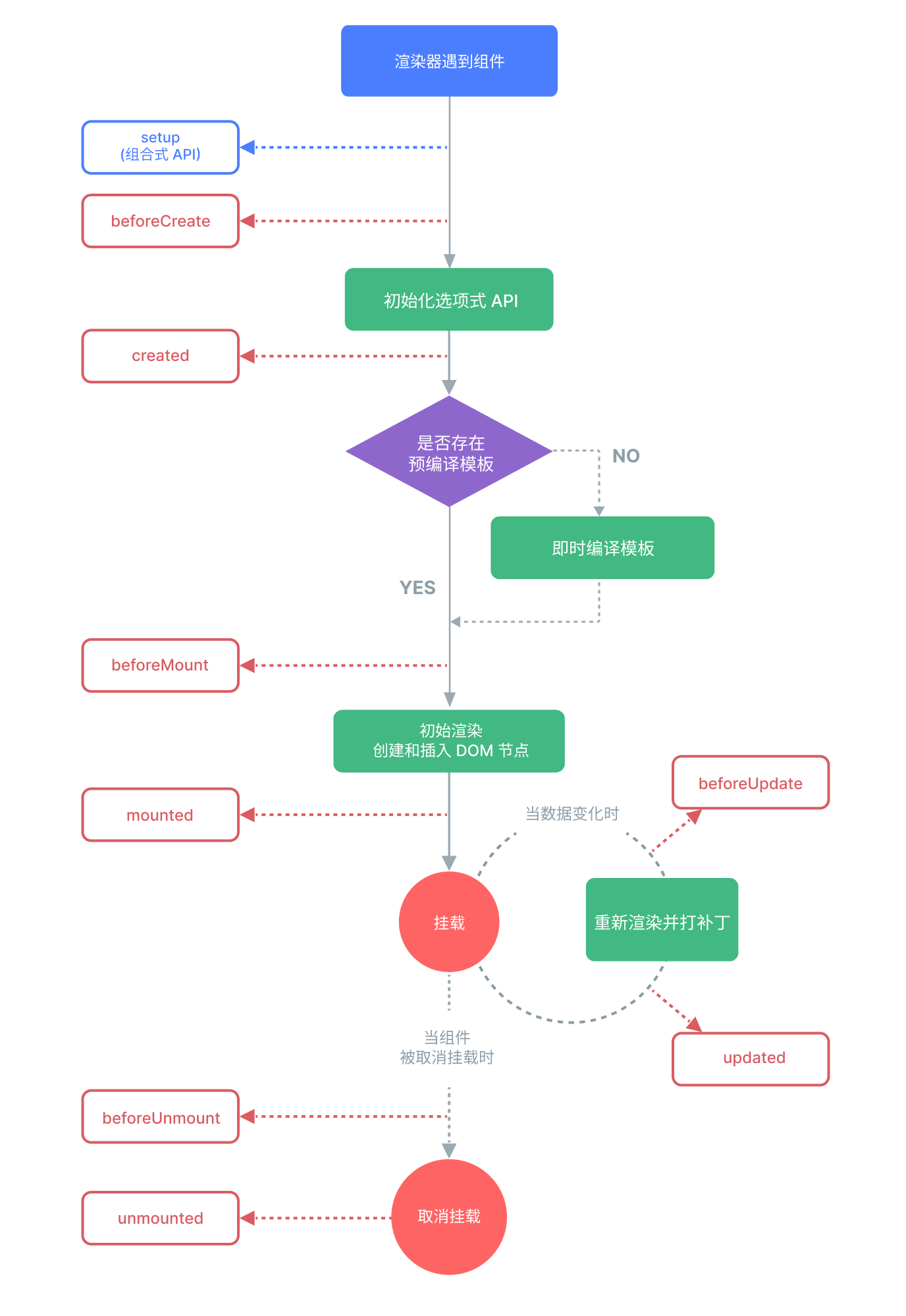
Vue学习笔记-S1
1 什么是Vue
Vue是一款用于构建用户界面的渐进式JavaScripte框架,可基于数据渲染用户页面.
1.1 Vue的知识架构
Vue核心包:声明式渲染、组件系统Vue构建:客户端路由、状态管理、构建工具局部使用Vue:快速入门、常用指令、生命周…
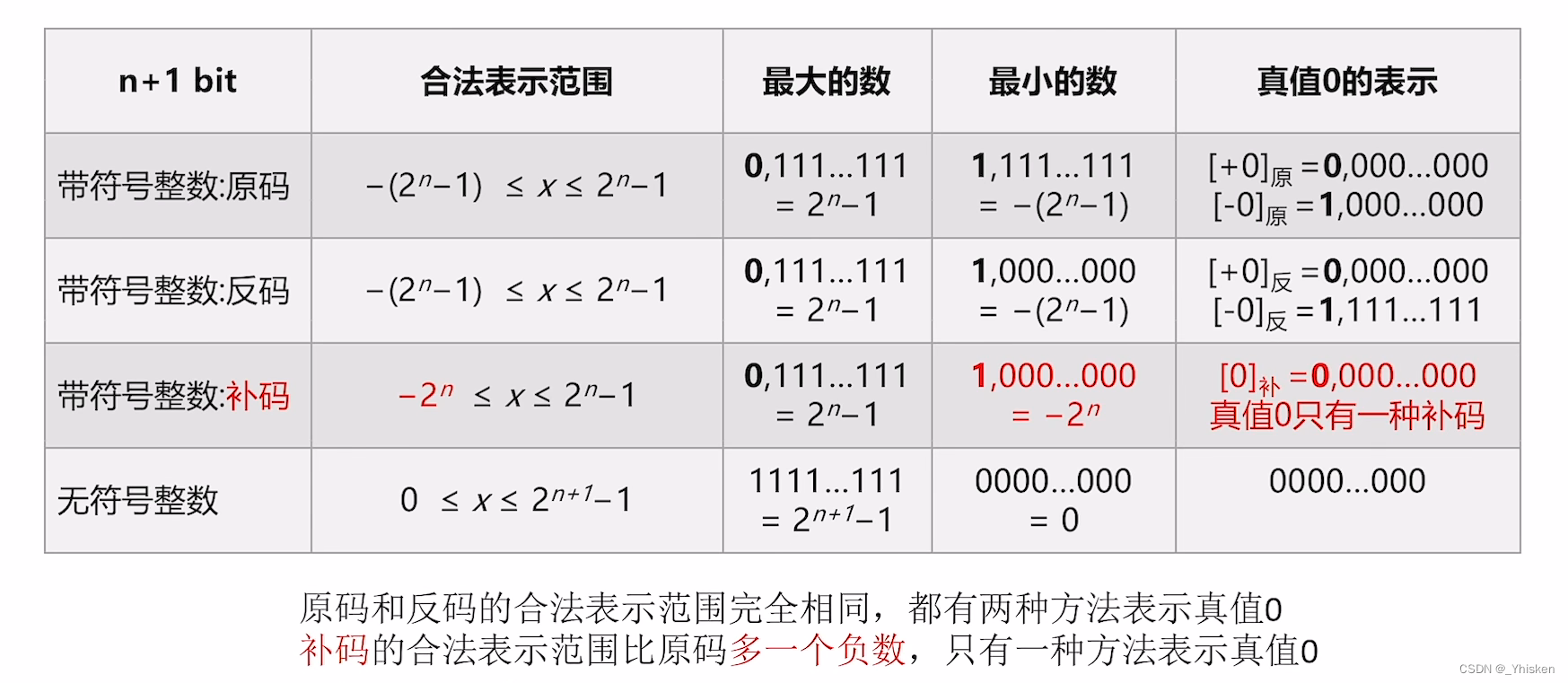
【计算机组成体系结构】整数的表示和运算 | 原码、反码和补码
一、无符号整数的表示和运算
机器字长决定了计算机能处理多少位的运算以及通用寄存器能存储的位数。例如8位机器字长的计算机只能处理8位的运算,以及通用寄存器只能存储8位。(现代PC的机器字长一般为32位/64位)
1.存储
8位只能存储 0 ~ 25…
【Go】面向萌新的Gin框架知识梳理学习笔记
目录
Gin框架简介
路由&路由组
1. 定义基本路由
2. 参数传递
3. 查询字符串参数
4. 路由组
5. 路由中间件
模板渲染
1. 加载模板
2. 定义模板
3. 渲染模板
4. 自定义模板函数
返回json
1. 导入 Gin 包
2. 创建 Gin 引擎
3. 定义路由和处理器函数
4. 运行服…
Linux shell编程学习笔记8:使用字符串
一、前言 字符串是大多数编程语言中最常用最有用的数据类型,这在Linux shell编程中也不例外。
本文讨论了Linux Shell编程中的字符串的三种定义方式的差别,以及字符串拼接、取字符串长度、提取字符串、查找子字符串等常用字符串操作,,以及反…
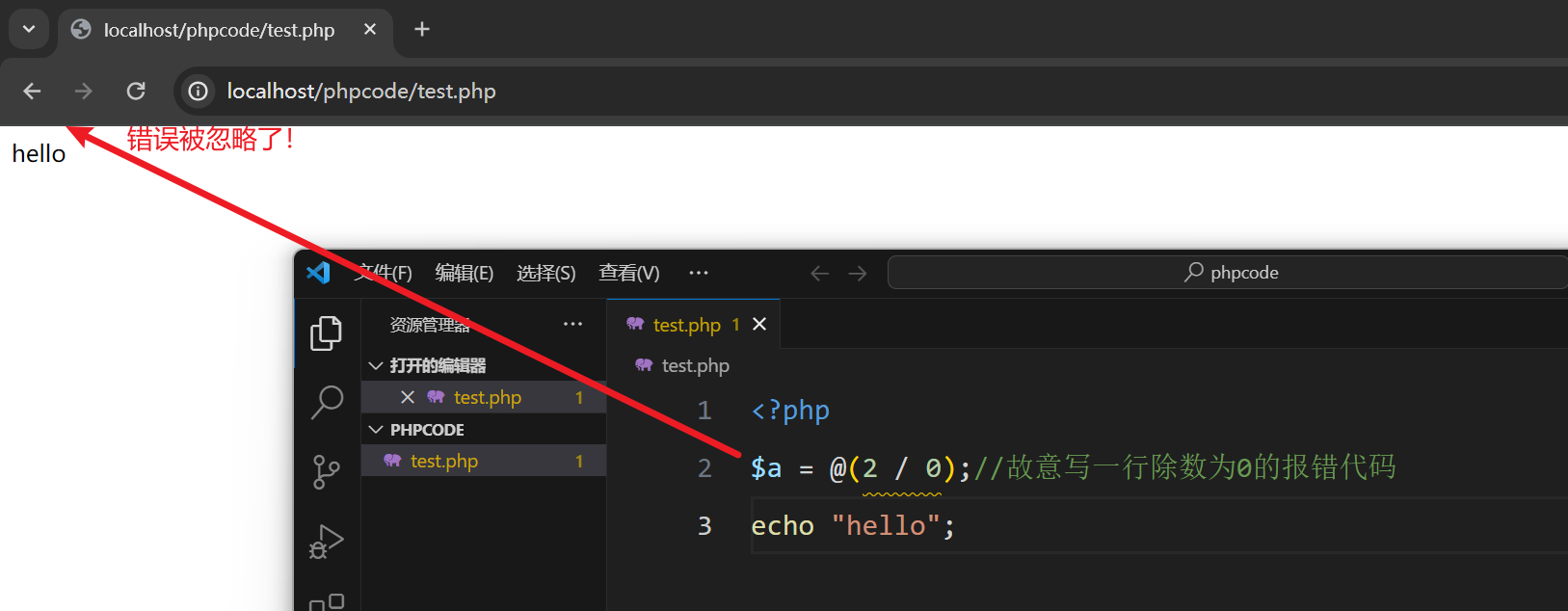
php基础学习之运算符(重点在连接符和错误抑制符)
运算符总结 在各种编程语言中,常用的运算符号有这三大类: 算术运算符:,-,*,/,%位运算符:&,|,^,<<,>>赋值运算符&…
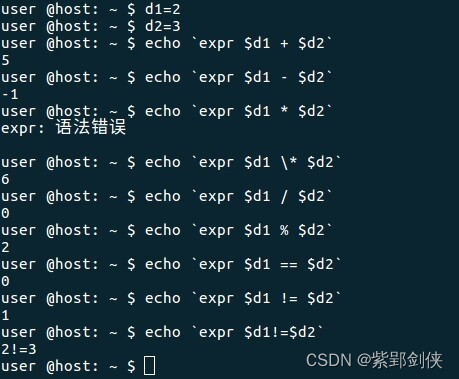
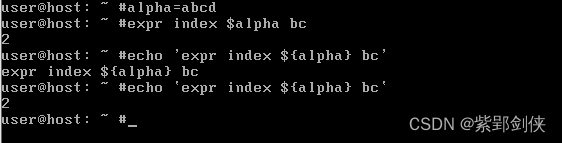
Linux shell编程学习笔记10:expr命令 和 算术运算
Linux Shell 脚本编程和其他编程语言一样,支持算数、关系、布尔、字符串、文件测试等多种运算。上节我们研究了 Linux shell编程 中的 字符串运算,今天我们研究 Linux shell编程的算术运算 ,为了方便举例,我们同时对expr命令进行…

算法修炼之筑基篇——筑基二层后期(初步理解解决贪心算法)
✨博主:命运之光 🦄专栏:算法修炼之练气篇 🍓专栏:算法修炼之筑基篇 ✨博主的其他文章:点击进入博主的主页 前言:学习了算法修炼之练气篇想必各位蒟蒻们的基础已经非常的扎实了,下来…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-5Laplace Transform of Convolution卷积的拉普拉斯变换](https://img-blog.csdnimg.cn/direct/b4b7f97d69d345758e3e7218bc4a7f5f.png)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-5Laplace Transform of Convolution卷积的拉普拉斯变换
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-5Laplace Transform of Convolution卷积的拉普拉斯变换 Laplace Transform : X ( s ) L [ x ( t ) ] ∫ 0 ∞ x ( t ) e − s t d t X\left( s \right) \mathcal{L} \left[ x\lef…

为什么要写这个带点玄幻气息的英语单词记忆博客
🌟博主:命运之光 ☀️专栏:英之剑法🗡 ❤️🔥专栏:英之试炼🔥 ☀️博主的其他文章:点击进入博主的主页 🐳 开篇想说的话:开学就大三了,命运之光…
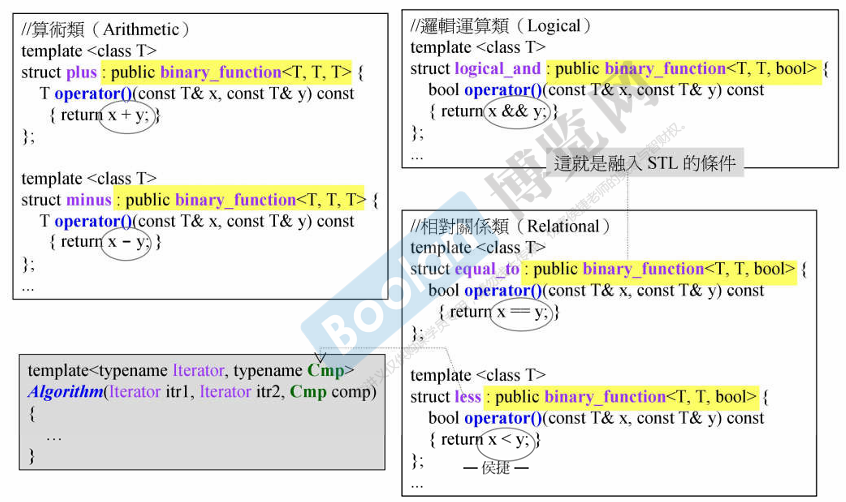
侯捷 C++ STL标准库和泛型编程 —— 6 算法 + 7 仿函数
6 算法
算法的标准样式:需要传进去两个指针 6.1 算法源码
6.1.1 accumulate
两个版本: 元素累加到 init 上 template <class InputIterator, class T>
T accumulate(InputIterator first, InputIterator last, T init)
{for (; first ! last; f…

Linux shell编程学习笔记5:变量命名规则、变量类型、使用变量时要注意的事项
跟其他的高级开发语言一样,Linux Shell编程中使用的数据也需要保存在变量中。
Shell使用变量来控制其行为,并且可以通过更改变量值来更改Shell和其他程序的行为。
我们先来了解一下变量命令的规则、变量类型和使用变量时要注意的事项。
一、变量命名规…
【模拟集成电路】鉴频鉴相器设计(Phase Frequency Detector,PFD)
鉴频鉴相器设计(Phase Frequency Detector,PFD)前言一、 PFD的工作原理二、 PFD电路设计(1)PFD电路图(2)D触发器电路图(3)与非门(NAND)电路图&…
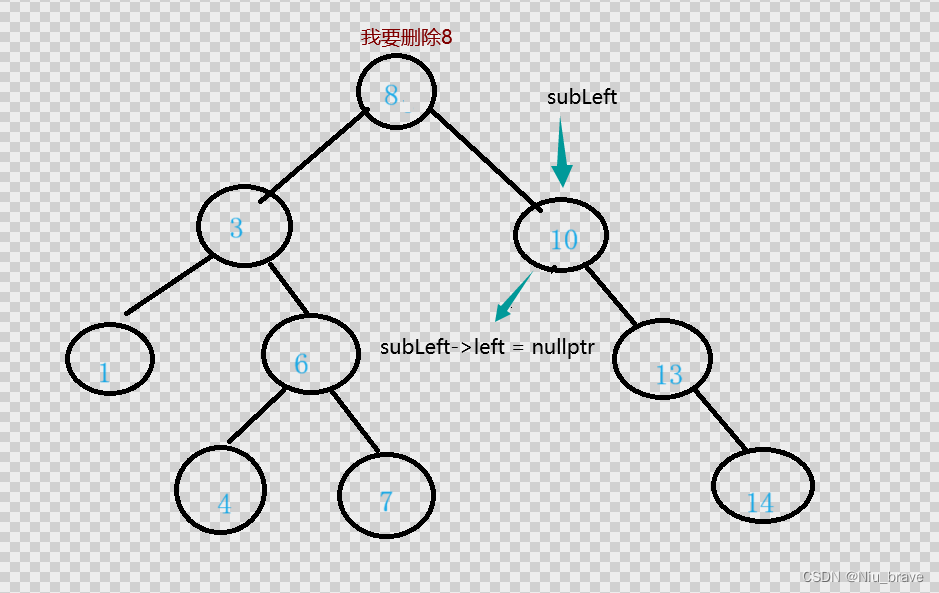
搜索二叉树实现(非递归版本)
目录 一,搜索二叉树是个啥?
二,搜索二叉树的实现
1.前期工作
2.方法实现
1.插入
2,查找
3.删除
三,实现二叉搜索树的全部代码 一,搜索二叉树是个啥? 话不多所,先给各位来一个…
![[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-8Matlab/Simulink传递函数Transfer Function](https://img-blog.csdnimg.cn/direct/301838452fb34a849ecb0dad60eff3d6.png)
[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-8Matlab/Simulink传递函数Transfer Function
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-数学基础Ch0-8Matlab/Simulink传递函数Transfer Function L − 1 [ a 0 Y ( s ) s Y ( s ) ] L − 1 [ b 0 U ( s ) b 1 s U ( s ) ] ⇒ a 0 y ( t ) y ˙ ( t ) b 0 u ( t ) b 1 u ˙ ( t…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-2稳定性分析Stability](https://img-blog.csdnimg.cn/direct/53a1bb1cc76c4762a1150bb4d2c4b407.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-2稳定性分析Stability
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-2稳定性分析Stability 0. 序言1. 稳定的分类2. 稳定的对象3. 稳定的系统4. 系统稳定性的讨论5. 补充内容——Transfer Function(传递函数) - nonzero Initial Condition(非零初始…
离散数学题目收集整理练习(期末过关进度60%)
✨博主:命运之光 🦄专栏:离散数学考前复习(知识点题) 🍓专栏:概率论期末速成(一套卷) 🐳专栏:数字电路考前复习 ✨博主的其他文章:点击…
【模拟集成电路设计】学习笔记(一)
【模拟集成电路设计】学习笔记(一) 前言:课堂tips1、放大器2、有源器件3、设置静态工作点Q的原因4、小信号近似的意义:5、为什么MOS可以作为放大元件6、集成电路中三种电阻(按照实现方式分类)7、Miller电容…

contiki学习笔记 clock部分
1.前言contiki是一款小型开源,易于移植的多任务操作系统,专门为无线传感网设计,适合内存受限制的网络系统。国内的研究和应用还处于初级阶段,甚至还不知道这个contiki如何发音,也没有那么响亮的中文名称。如果还没有中…

Gc学习笔记:浅谈GC,简略分析CMS,Jvm堆内存结构,JVM性能调优等
标题测试工具
jvisual jvisual 自从jdk8之后就被移除掉了,我们需要自己去下载 https://visualvm.github.io/ 下载之后,GC图是不存在的,需要自己安装 Tools->Plugins->Available Plugins->Visual GC 勾选,然后Install即可…
![[CS229学习笔记] 2.线性回归及梯度下降](https://img-blog.csdnimg.cn/20191013115911137.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3FxXzIyOTQzMzk3,size_16,color_FFFFFF,t_70#pic_center)
[CS229学习笔记] 2.线性回归及梯度下降
本文对应的是吴恩达老师的CS229机器学习的第二课。这节课先介绍了线性回归及其损失函数;然后讲述了两个简单的优化方法,批梯度下降和随机梯度下降;最后推导了矩阵形式的线性回归。 本文出现的图片均来自于coursera上吴恩达老师的机器学习公开…
![[足式机器人]Part4 南科大高等机器人控制课 CH10 Bascis of Stability Analysis](https://img-blog.csdnimg.cn/direct/4d9db554c7ce4010b525499f4ff67684.png#pic_center)
[足式机器人]Part4 南科大高等机器人控制课 CH10 Bascis of Stability Analysis
本文仅供学习使用 本文参考: B站:CLEAR_LAB 笔者带更新-运动学 课程主讲教师: Prof. Wei Zhang 南科大高等机器人控制课 Ch10 Bascis of Stability Analysis 1. Background1.1 What is Stability Analysis1.2 General ODE Models for Dynamic…
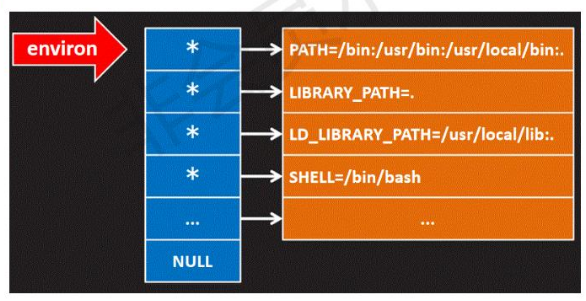
【嵌入式学习笔记-01】什么是UC,操作系统历史介绍,计算机系统分层,环境变量(PATH),错误
【嵌入式学习笔记】什么是UC,操作系统历史介绍,计算机系统分层,环境变量(PATH),错误 文章目录 什么是UC?计算机系统分层什么是操作系统? 环境变量什么是环境变量?环境变量的添加&am…

java学习笔记(2)--hello world
java编写一段java源代码
一、新建一个java文档(这里用记事本来写)
首先创建一个文本: 然后将文本后缀更改为.java 如果不显示后缀名字,这里以我的电脑为例 二、用记事本打开新建的java文件,并写入代码࿰…

java学习笔记(1)--win7 java环境的搭建
java的学习笔记(一)
搭建java环境
1.下载一个安装程序
需下载一个jdk安装包,JDK:Java开发员的软件开发工具包。 官网网址 https://www.oracle.com/java/technologies/javase-downloads.html 也可以在百度上直接搜。(…

MySQL(InnoDB)高级篇(持续更新)
文章目录MySQL高级篇(InnoDB)1.索引1.InnoDB存储引擎----B Tree索引2.索引分类3.聚簇索引、非聚簇索引4. InnoDB存储引擎---hash索引5. 使用InnoDB,为什么推荐使用自增的整数类型作为主键?6.复合索引最左前缀原则最左前缀…
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch00-5 刚体的加速度与角加速度
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有帮助请引用 本文参考: . 食用方法 求解逻辑:速度与加速度都是在…

【模拟集成电路】反馈系统——基础到进阶(二)
【模拟集成电路】反馈系统——基础到进阶(二) ------------------------------------------------文末附往期文章链接-------------------------------------- 1反馈结构2反馈系统分析2.1环路增益求解方法2.1二端口网络2.2电压-电压反馈2.2.1闭环增益2.2…

第四章:初阶试炼(三)---类和对象(下)
目录
前言🍏
1. 再谈构造函数🍎
1.1 构造函数体赋值
1.2 初始化列表
1.3 explicit关键字
2. Static成员🍊
2.1 概念
2.2 特性
3. 友元🍐
3.1 友元函数
3.1.1 实现自定义类型流插入
3.1.2 实现多组流插入
3.1.3 实现自…
Cpp学习——类与对象3
目录 一,初始化列表
1.初始化列表的使用 2.初始化列表的特点
3.必须要使用初始化列表的场景 二,单参数构造函数的隐式类型转换
1.内置类型的隐式类型转换
2. 自定义类型的隐式类型转换
3.多参数构造函数的隐式类型转换 4.当你不想要发生隐式类型转换…


MPC模型预测控制器学习笔记(附程序)
本文用于记录学习DR_CAN老师发布的MPC系列视频教程的相关内容,文章中放的源码也是DR_CAN老师提供的程序示例,链接如下: DR_CAN老师的视频教程链接(点击可跳转) DR_CAN老师提供的程序示例(点击可跳转&#x…
MYSQL日期函数_MYSQL时间函数详解和实战(你想要的都有70多个函数几百种用法建议收藏以备查阅)
MySQL的时间函数用于处理日期和时间数据。以下是一些常用的MySQL时间函数。 内容有点多,建议收藏以备后续用到查阅参考。 目录
一、获取当前日期时间
二、获取当前日期
三、获取当前时间
四、日期时间选取函数(Extract函数)
五、WEEK相关…
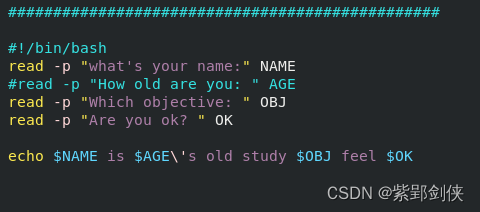
Linux shell编程学习笔记36:read命令
*更新日志 *2023-12-18 1.根据[美] 威廉肖特斯 (Willian shotts)所著《Linux命令行大全(第2版)》 更新了-e、-i、-r选项的说明 2.更新了 2.8 的实例,增加了gif动图 3.补充了-i的应用实例 2.1…
![[足式机器人]Part2 Dr. CAN学习笔记-Ch0-1矩阵的导数运算](https://img-blog.csdnimg.cn/direct/c7499731c8c04e97a668d03762c8104c.png)
[足式机器人]Part2 Dr. CAN学习笔记-Ch0-1矩阵的导数运算
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-Ch0-1矩阵的导数运算 1. 标量向量方程对向量求导,分母布局,分子布局1.1 标量方程对向量的导数1.2 向量方程对向量的导数 2. 案例分析,线性回归3. 矩阵求导的链…
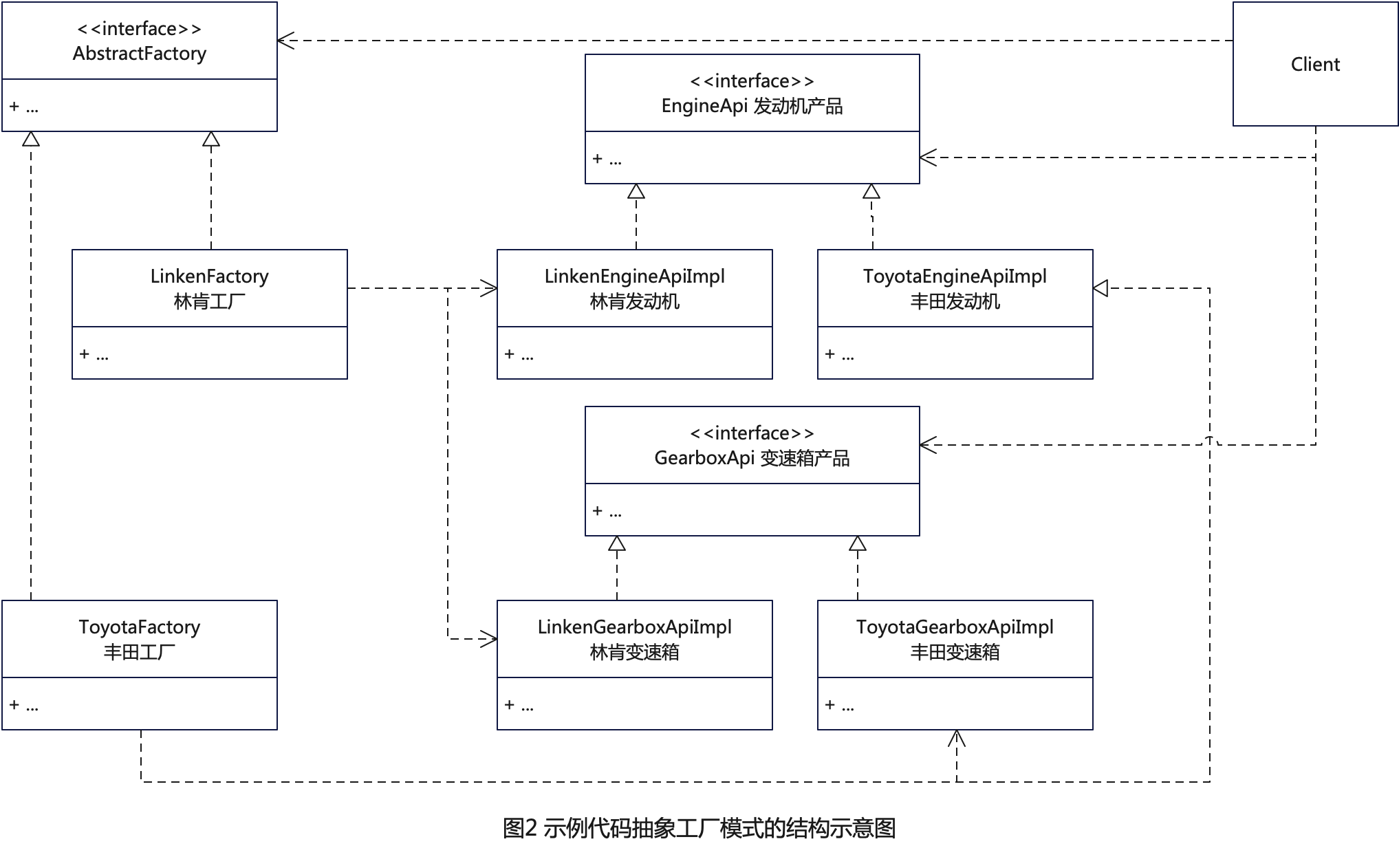
探索设计模式的魅力:抽象工厂模式的艺术
抽象工厂模式(Abstract Factory Pattern)是一种创建型设计模式,用于在不指定具体类的情况下创建一系列相关或相互依赖的对象。它提供了一个接口,用于创建一系列“家族”或相关依赖对象,而无需指定它们的具体类。 主要参…
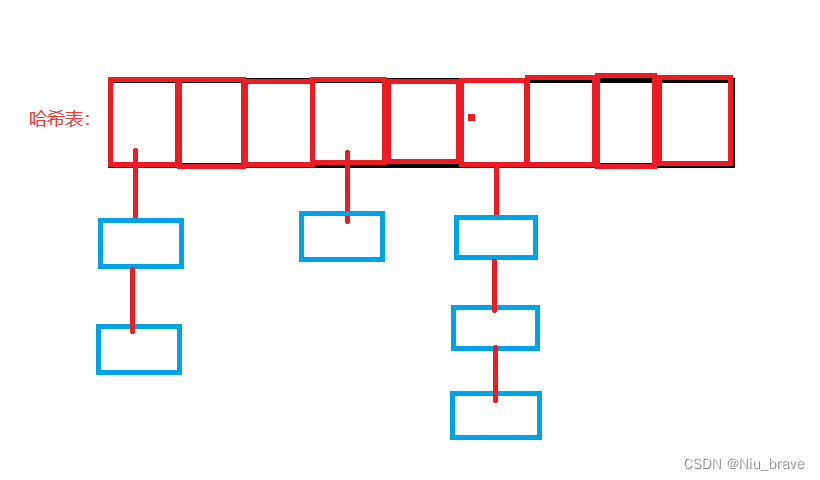
哈希表的实现(2):拉链法实现哈希表
一,拉链法 在使用线性探测法实现哈希表时,会发生哈希冲突。这个时候就得向后找位置给新插入的值。这个过程无疑会对哈希表的效率有很大的影响。那我们能不能通过另一种方式来实现哈希表,让哈希表不会发生哈希冲突呢?答案当然是可以…
贪心算法学习------优势洗牌
目录
一,题目
二,题目接口
三,解题思路和代码
全部代码: 一,题目 给定两个数组nums1和nums2,nums1相对于nums2的优势可以用满足nums1[i]>nums2[i]的索引i的数目来描述。 返回nums1的任意排序,使其优…
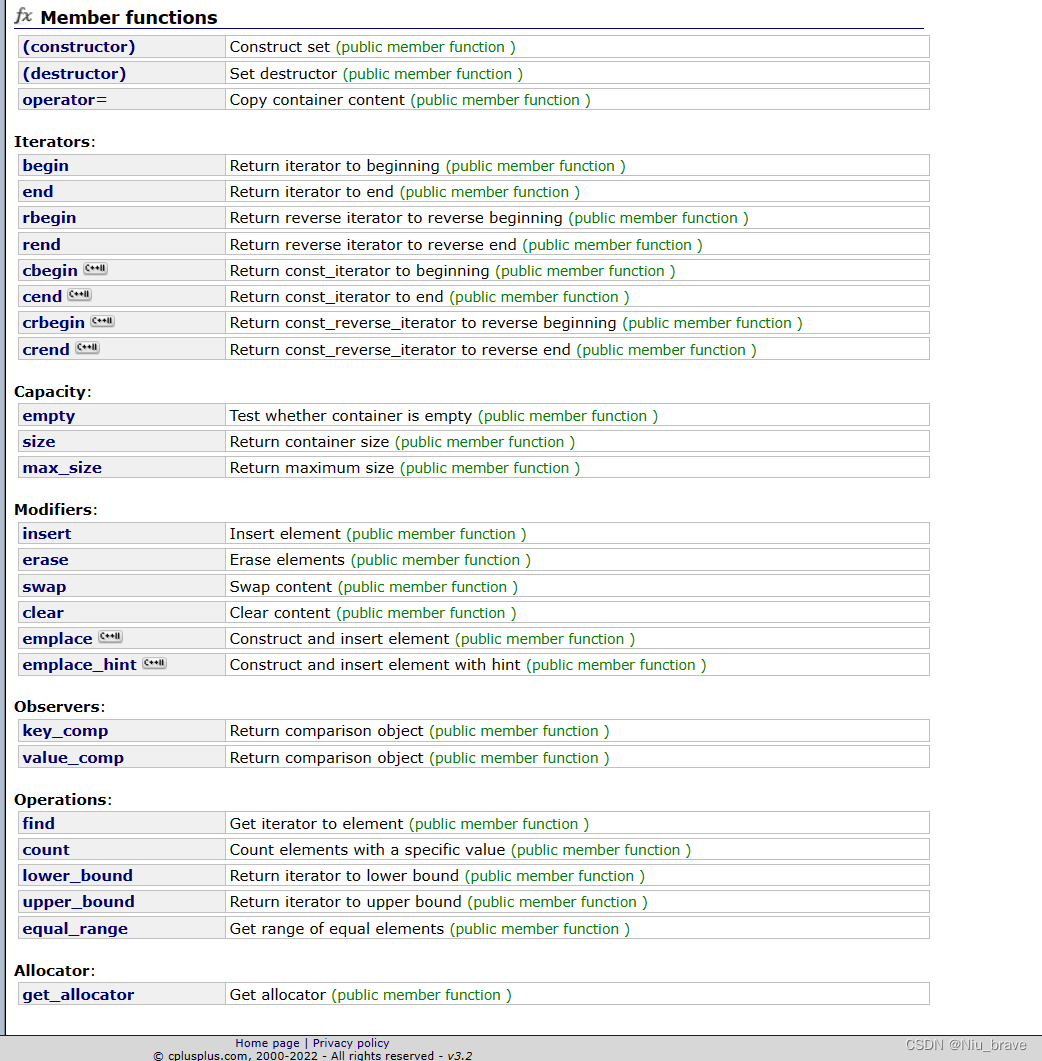
map与set使用方法总结
一,map与set简介 map与set本质上便是一个关联容器,它们的底层都是一个叫做红黑树的数据结构。当然,所谓的红黑树又是一个二叉搜索树。所以追根溯源,map和set都是用二叉搜索树(红黑树)实现的容器。 在C中&am…
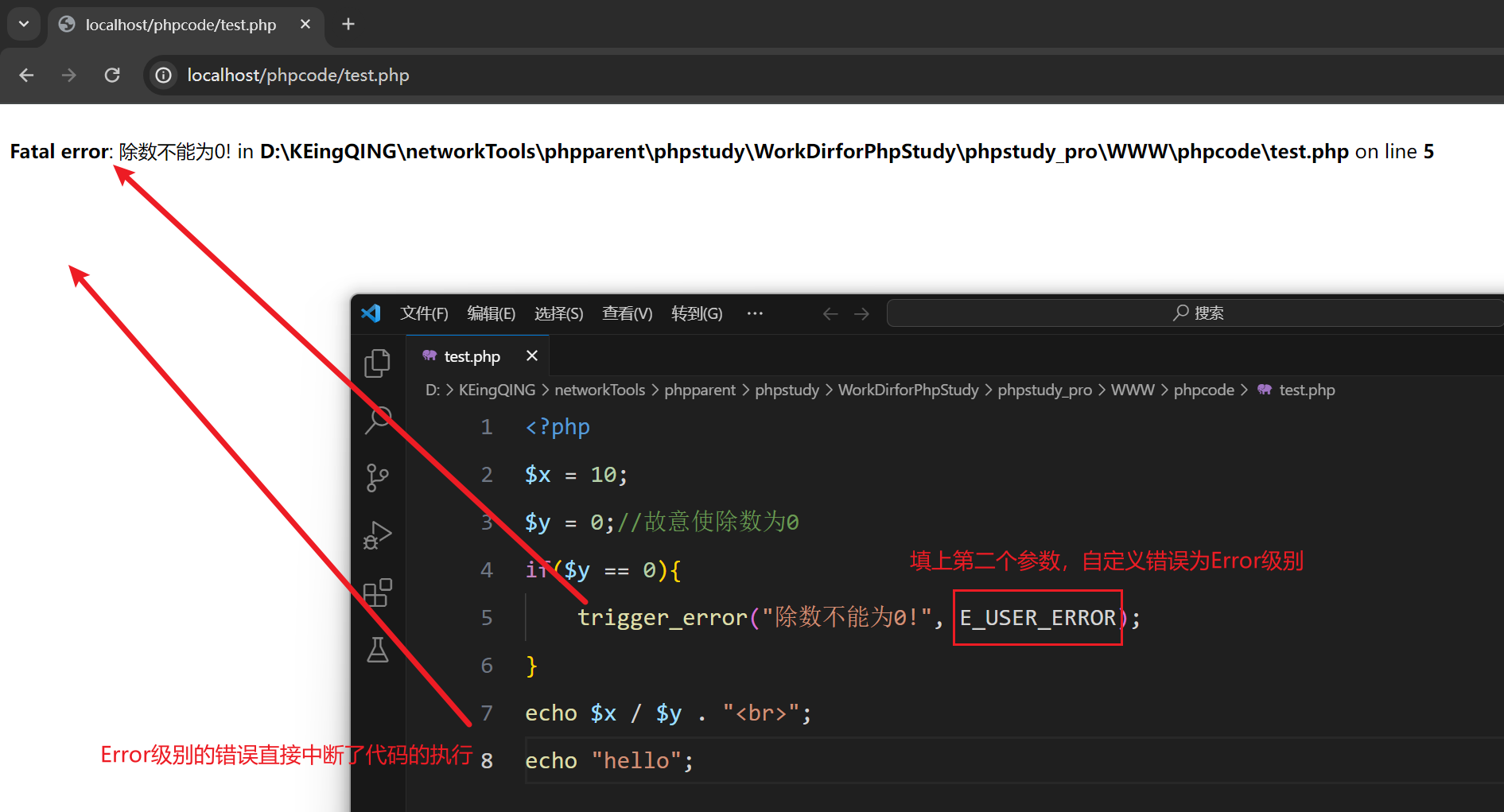
php基础学习之错误处理(其一)
一,错误处理的概念 错误处理指的是系统(或者用户)在执行某些代码的时候,发现有错误,就会通过错误处理的形式告知程序员,俗称报错 二,错误分类 语法错误:书写的代码不符合 PHP 的语法规范,语法错…
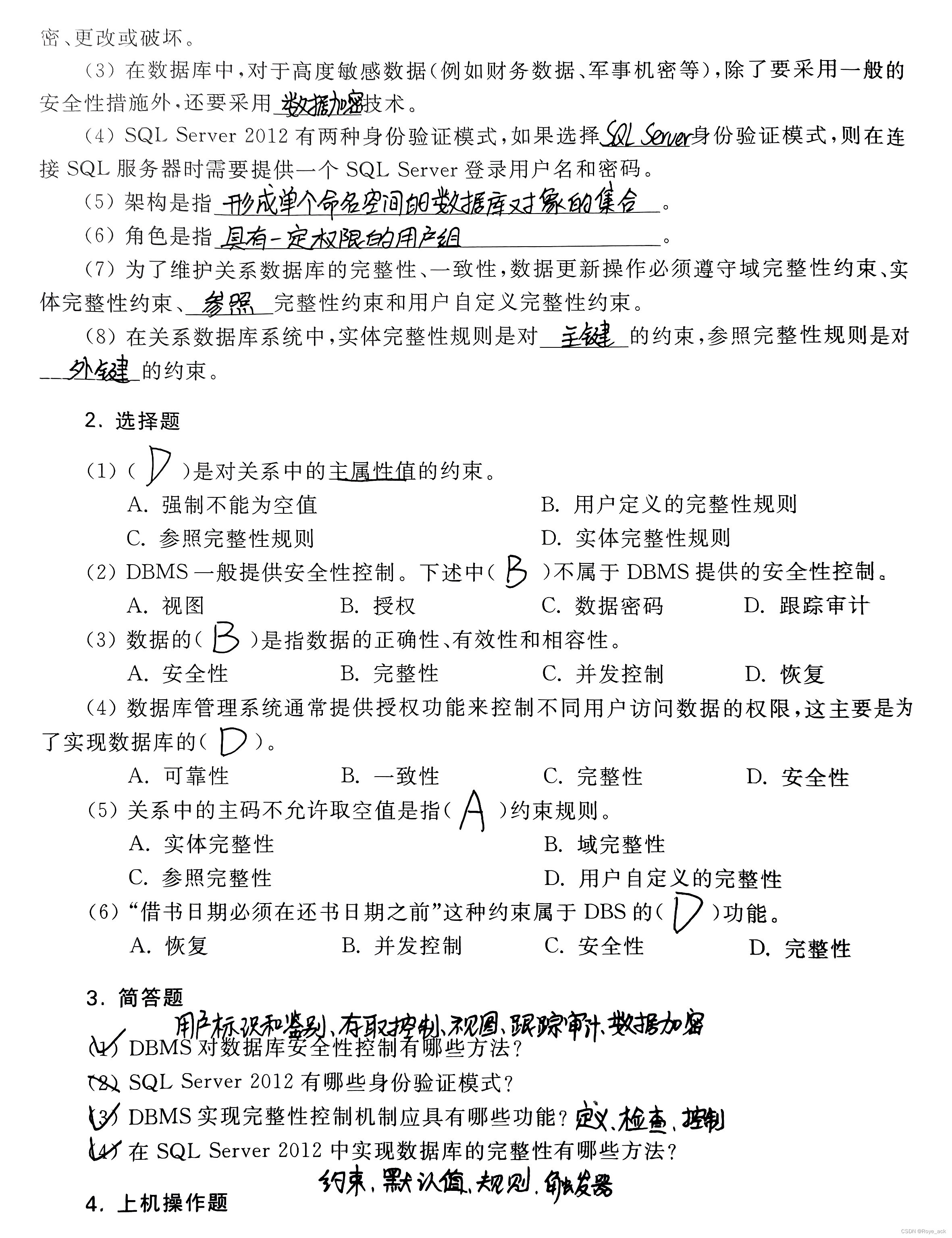
【数据库原理与应用 - 第七章】数据库安全性和完整性控制
目录
一、数据库安全性控制
二、数据库完整性控制
三、课后习题 数据库的保护功能:数据库安全性、完整性、数据库恢复、并发控制 一、数据库安全性控制 数据库的安全性:保护数据库,以防止非授权用户非法存取造成的数据泄密、更改、破坏DBM…

Linux学习——进程状态
目录 一,进程状态
1,进程状态的分类
2.状态的本质
3.进程状态详解
1.运行状态
2.阻塞状态
3.挂起状态
4.Linux内核中的状态分类 一,进程状态
1,进程状态的分类 如下图: 在计算机中我们的状态的分类便如下图所示…
![[自学记录06|*Animation]四元数、死锁与方位插值](https://img-blog.csdnimg.cn/55dbb247a82d494fa757741ba07bd1ec.png)
[自学记录06|*Animation]四元数、死锁与方位插值
一、前言
还记得在很久以前不知道什么时候,看到过一个TA的面经,里面提到了四元数和万向锁,当时自己也查了一些资料,但是看的也是云里雾里,恰巧这两天学校的动画原理课讲到了这,打算整理一下做个小结。 二、…
支配树(Dominator Tree)学习笔记
因为是学习笔记所以是边学边写,以防自己到时候忘掉了w
一些定义和性质
首先,支配树是一棵树(废话),用来求解必经点问题。 即求一个有向图中以r为根到达每一个点的必经点。 树中每一个点x的父亲为idom(x)࿰…
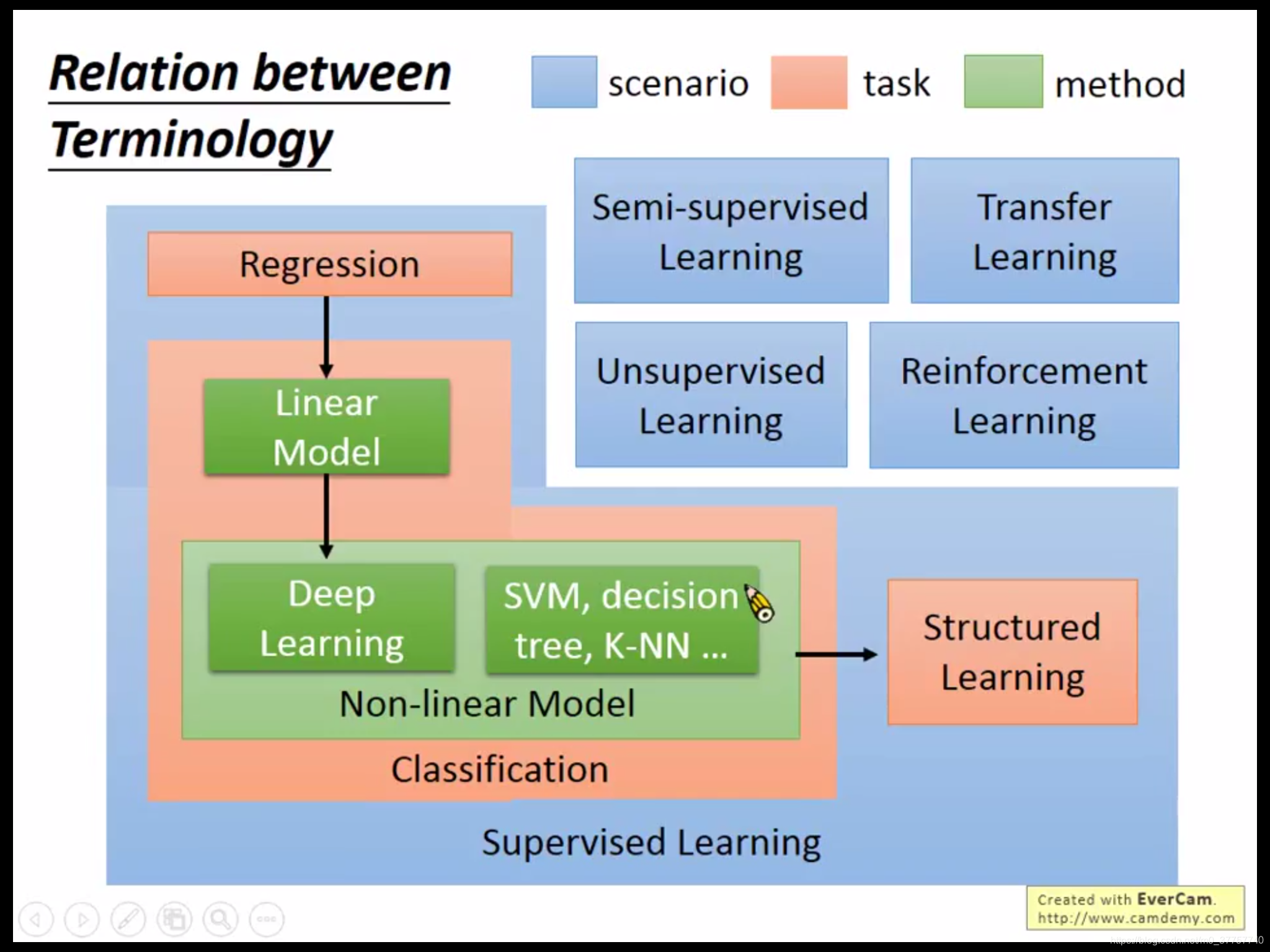
李宏毅机器学习——学习笔记(1)
人工智能,机器学习和深度学习的关系?人工智能是目标,机器学习是1980年发现的用于实现人工智能的手段,深度学习是2010年后发展的一种属于机器学习的方法。 手工规则(hand-crafted rules):僵硬&a…
Spark大数据分析与实战笔记(第一章 Scala语言基础-4)
文章目录 每日一句正能量1.4 Scala面向对象的特性1.4.1 类与对象的特性1.4.2 继承1.4.3 单例对象和伴生对象1.4.4 特质 每日一句正能量 若要快乐,就要随和;若要幸福,就要随缘。快乐是心的愉悦,幸福是心的满足。别和他人争吵&#…
算法学习——贪心算法
目录 一,柠檬水找零
1.题目
2.题目接口
3.题目解题思路
二,将数组减半的最小操作数 1.题目
2.题目接口
3.解题思路及代码
三,摆动序列
1.题目
2.题目接口
3.解题代码及思路 一,柠檬水找零
1.题目 在柠檬水摊上…
Linux shell编程学习笔记18:while循环语句
上回我们研究和探讨了Linux shell编程中for 循环语句,与在C/C中一样,for 循环语句Linux shell编程中有很多灵活的用法。今天我们来研究和探讨while循环语句。
一、数字条件循环
我们继续以for循环语句中的例子,计算 从1到10与2的乘积 并输出…
贪心算法学习——最长单调递增子序列
目录
编辑
一,题目
二,题目接口
三,解题思路和代码 一,题目 给你一个整数数组 nums ,找到其中最长严格递增子序列的长度。 子序列 是由数组派生而来的序列,删除(或不删除)数组…
2022全国职业技能大赛-网络安全赛题解析总结③(超详细)
2022全国职业技能大赛-网络安全赛题解析总结(自己得思路) 模块A 基础设施设置与安全加固(20分)模块B 网络安全事件响应、数字取证调查和应用安全(40分)模块C CTF夺旗-攻击(20分)模块D CTF夺旗-防御(20分)有什么不懂得可以联系博主!交流群:603813289模块A 基础设施设…

绪论-算法【数据结构与算法】
文章主要是对于数据结构与算法课程学习的读书记录。欢迎学习交流。 [内容范围]第一章绪论 -算法 文章目录算法用途算法是满足下列性质的指令序列计算机问题求解5步骤算法复杂度分析时间复杂度具体计算规定最坏、最好、平均时间复杂度目的[回顾]算法复杂度分析流程图渐进表达式的…
Cpp学习——编译链接
目录
编辑
一,两种环境
二,编译环境下四个部分的
1.预处理
2.编译
3.汇编
4.链接 三,执行环境 一,两种环境 在程序运行时会有两种环境。第一种便是编译环境,第二种则是执行环境。如下图: 在程序运…
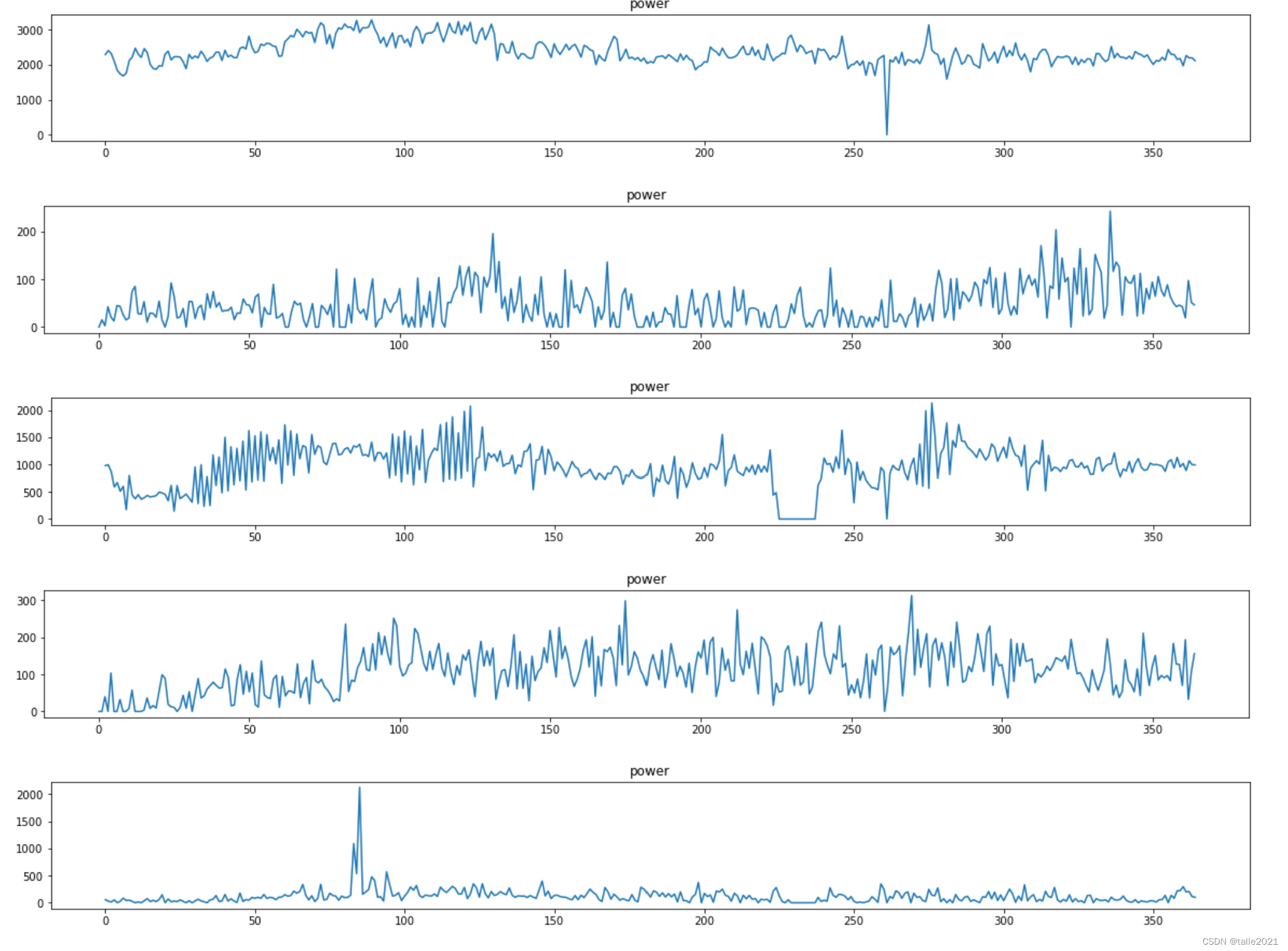
Datawhale-新能源时间序列赛事学习笔记(1)
1.赛题描述 在电动汽车充电站运营管理中,准确预测充电站的电量需求对于提高充电站运营服务水平和优化区域电网供给能力非常关键。本次赛题旨在建立站点充电量预测模型,根据充电站的相关信息和历史电量数据,准确预测未来某段时间内充电站的充电…
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-8Lag Compensator滞后补偿器](https://img-blog.csdnimg.cn/direct/aa601dd806934390a440e1038e13d16e.png#pic_center)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-8Lag Compensator滞后补偿器
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-8Lag Compensator滞后补偿器 从稳态误差入手(steady state Error) 误差 Error : E ( s ) R ( s ) − X ( s ) R ( s ) − E ( s ) ⋅ K G …

深入剖析:Kafka流数据处理引擎的核心面试问题解析75问(5.7万字参考答案)
Kafka 是一款开源的分布式流处理平台,被广泛应用于构建实时数据管道、日志聚合、事件驱动的架构等场景。本文将深入探究 Kafka 的基本原理、特点以及其在实际应用中的价值和作用。 Kafka 的基本原理是建立在发布-订阅模式之上的。生产者将消息发布到主题(…
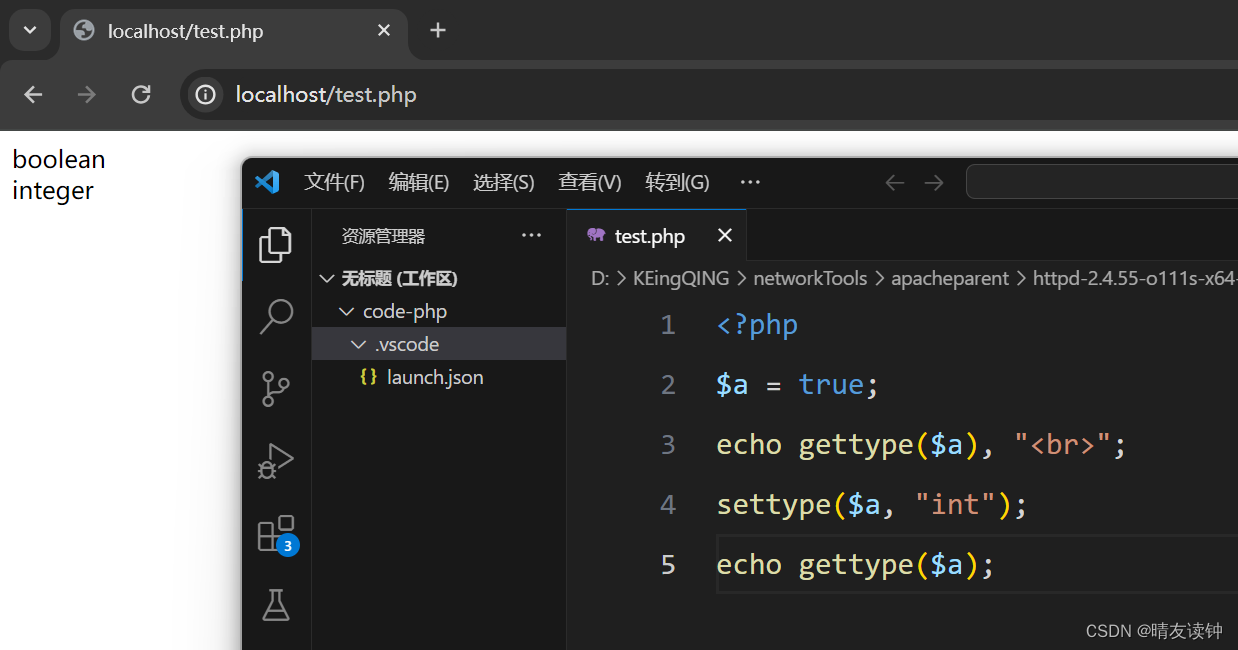
php基础学习之数据类型
php数据类型的基本概念
数据类型:data type,在PHP中指的是数据本身的类型,而不是变量的类型。
PHP 是一种弱类型语言,变量本身没有数据类型。 把变量类比成一个杯子(容器),杯子可以装雪碧、可…

【模拟CMOS集成电路】电路失调与CMRR—— 随机失调与系统失调分析(1)
电路失调与CMRR—— 随机失调与系统失调分析(1)前言1.1失调1.2失调电路模型1.2.1随机失调电路模型(1)电阻失配(2)跨导失配(3)电流镜的随机失调1.2.2系统失调前言 本文主要内容是失调…
侯捷 C++ STL标准库和泛型编程 —— 4 分配器 + 5 迭代器
4 分配器
4.1 测试
分配器都是与容器共同使用的,一般分配器参数用默认值即可
list<string, allocator<string>> c1;不建议直接用分配器分配空间,因为其需要在释放内存时也要指明大小
int* p;
p allocator<int>().allocate(512,…
Linux shell编程学习笔记19:until循环语句
Linux shell编程中的until语句,在功能上与其它编程语言一致,但在结构与其它编程语言又不太一样。在大多数编程语言中,until语句的循环条件表达式一般位于循环体语句的后面,但是在Linux shell编程中,until语句的循环条件…
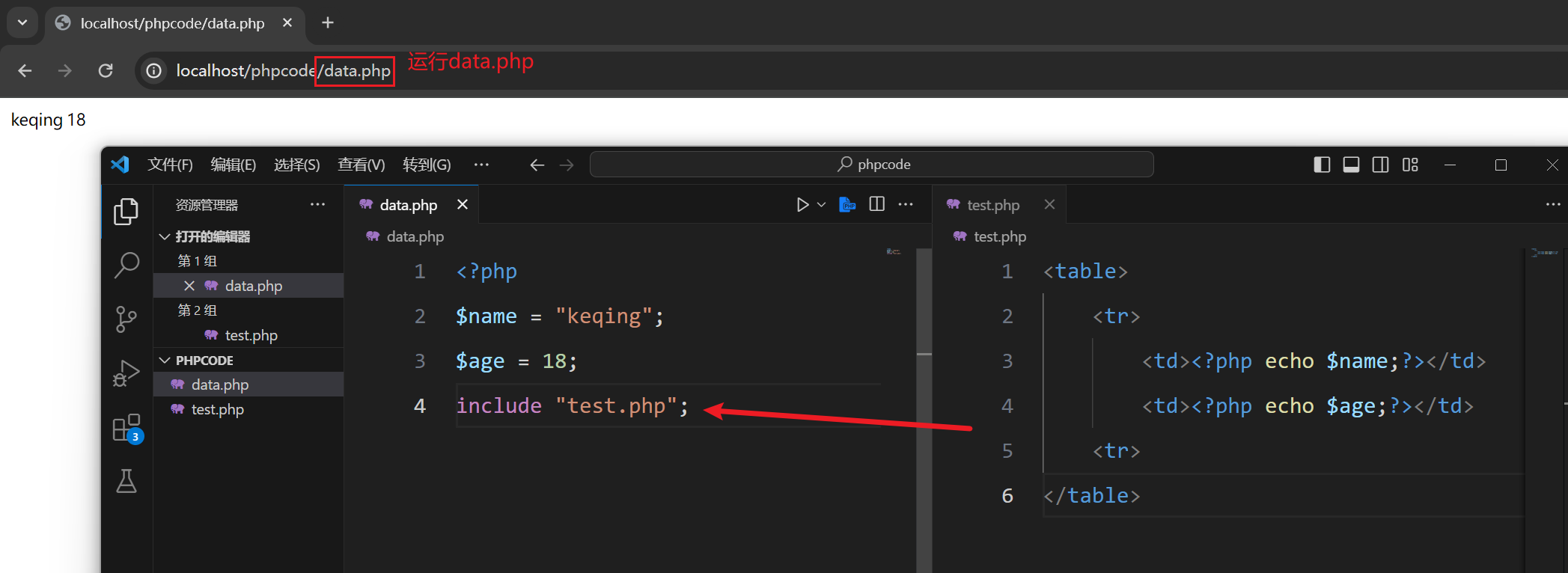
php基础学习之文件包含
描述 在一个php脚本中,将另一个php文件包含进来,合作实现某种功能 这个描述看起来似乎和C/Java等语言的头文件/包有点类似,但本质是不一样的 打个比方: C/Java的头文件/包更像是一个工具箱,存放各种很完善的工具&#…

2023年总结:雄关漫道真如铁,而今迈步从头越,今朝得失
2023年悄然离去,感谢大家的帮助、鼓励和陪伴,感谢家人的理解和支持,祝大家新年快乐,阖家幸福,身体健康。像往常一样,今年也会写一篇年终总结,也是自己的第11篇年终总结,题目就叫《雄…
数据库系统概述——第六章 关系数据理论(知识点复习+练习题)
🌟博主:命运之光 🦄专栏:离散数学考前复习(知识点题) 🍓专栏:概率论期末速成(一套卷) 🐳专栏:数字电路考前复习 🦚专栏&am…
【TypeScript笔记】01 - TS初体验 TS常用类型
文章目录导读开发环境TS 介绍TS 初体验安装编译TS工具包编译并运行TS简化运行TSTS常用类型TS类型注解TS常用基础类型参考资料导读 入门级TypeScript,《 黑马程序员前端TypeScript教程,TypeScript零基础入门到实战全套教程》https://www.bilibili.com/vid…
MYSQL JSON函数详解和实战(JSON函数大全,内含示例)
MySQL提供了许多JSON函数,用于对JSON数据进行各种处理。以下是一些常用的JSON函数。 建议收藏以备后续用到查阅参考。 目录
一、JSON_EXTRACT 提取指定数据
二、JSON_UNQUOTE 取消双引号
三、JSON_KEYS 取成员的数组
四、JSON_ARRAY 将参数转为数组
五、JSON_O…
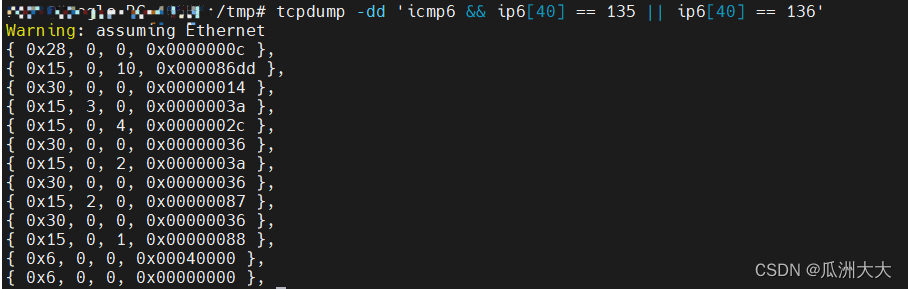
【openwrt学习笔记】IPV6 ND协议学习和socket编程
目录 一、参考链接二、学习目标三、代码解析3.1 仅解析NA报文保存设备mac和ipv6地址信息3.1.1 open_ns_socket3.1.2 recv_ns_pack 3.2 解析NA和NS报文中DAD报文保存设备mac和ipv6地址信息3.2.1 open_ns_na_socket3.2.2 recv_ns_na_pack 四、代码优化4.1 BPF参考学习资料4.2 代码…
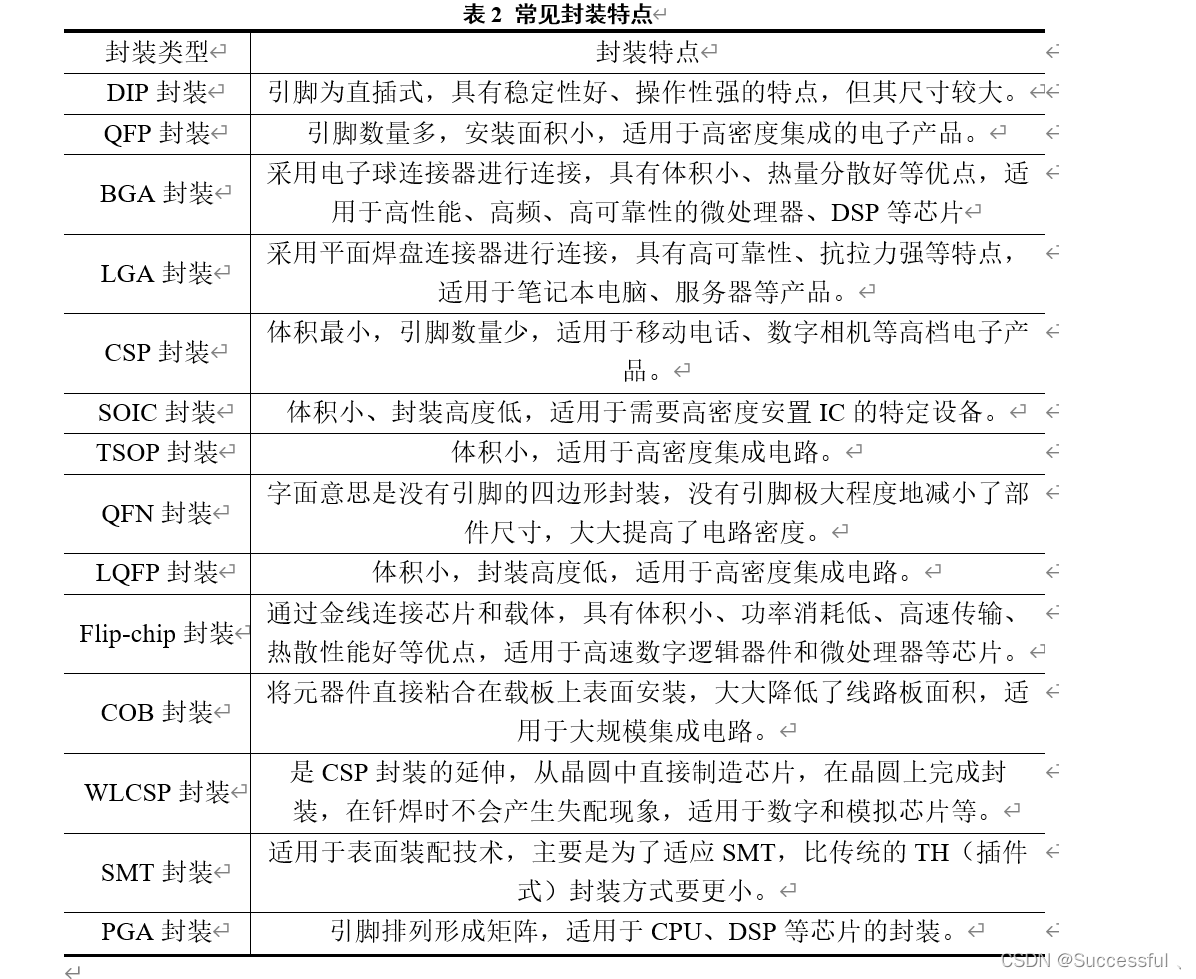
【ICer必备 4】IC封装设计流程
【ICer必备 3】模拟IC设计全流程 ------------------------------------------------文末附往期文章链接--------------------------------------前言一、IC封装设计过程二、常见IC封装类型三、常见封装特点四、封装设计常用软件五、EM仿真常用EDA(1)HFS…
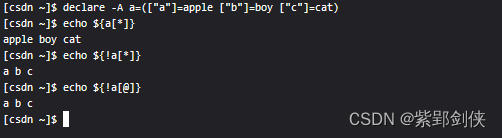
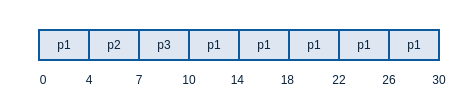
Linux shell编程学习笔记16:bash中的关联数组
上一节我们探讨了普通的数组,即使用数字下标来索引数组中不同的元素的数组,也可以称之为索引数组。
相比纯粹的数字,字符串不仅能表明含义,也更便于记忆使用,于是就有了关联数组。 一、关联数组概述 bash 从4.0开始支…

Cpp学习——string模拟实现
目录 一,string的成员变量
二,string的各项功能函数
1.构造函数
2.析构函数 3.扩容函数
4.插入与删除数据的函数
5.运算符重载
6.打印显示函数
7,拷贝构造
8.find函数 一,string的成员变量 在模拟实现string之前ÿ…
[足式机器人]Part3 机构运动学与动力学分析与建模 Ch01-1 刚体系统的运动学约束
本文仅供学习使用,总结很多本现有讲述运动学或动力学书籍后的总结,从矢量的角度进行分析,方法比较传统,但更易理解,并且现有的看似抽象方法,两者本质上并无不同。 2024年底本人学位论文发表后方可摘抄 若有帮助请引用 本文参考: 《空间机构的分析与综合(上册)》-张启先…
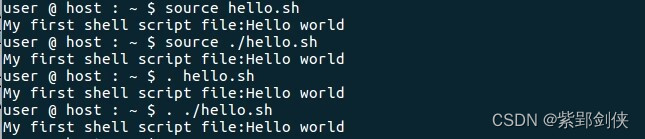
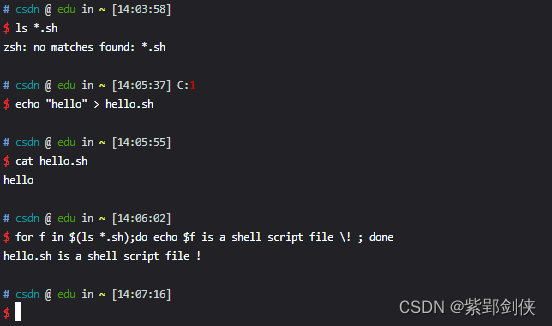
Linux shell编程学习笔记14:编写和运行第一个shell脚本hello world!
* 20231020 写这篇博文断断续续花了好几天,为了说明不同shell在执行同一脚本文件时的差别,我分别在csdn提供线上Linux环境 (使用的shell是zsh)和自己的电脑上(使用的shell是bash)做测试。功夫不负有心人&am…

机器人中的数值优化(五)——信赖域方法
本系列文章主要是我在学习《数值优化》过程中的一些笔记和相关思考,主要的学习资料是深蓝学院的课程《机器人中的数值优化》和高立编著的《数值最优化方法》等,本系列文章篇数较多,不定期更新,上半部分介绍无约束优化,…